(LiIo)- und Lithium-Polymer (LiPo) - Graupner
(LiIo)- und Lithium-Polymer (LiPo) - Graupner
(LiIo)- und Lithium-Polymer (LiPo) - Graupner

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
dieser Displayseite unbedingt die Hinweise auf Seite<br />
228.<br />
Wert Erläuterung mögliche<br />
Einstellungen<br />
OUTPUT<br />
CH<br />
Kanalauswahl 1 … je nach<br />
Empfänger<br />
REVERSE Servoumkehr AUS / EIN<br />
CENTER Servomitte in µs wenn aktiv<br />
(invers),<br />
abhängig von<br />
Geberposition<br />
TRIM Trimmposition in µs<br />
Abweichung von der<br />
CENTER-Position<br />
-120 … +120 µs<br />
LIMIT– Wegbegrenzung auf<br />
der „–“-Seite des<br />
Servoweges in %<br />
Servoweg<br />
30 … 150 %<br />
LIMIT+ Wegbegrenzung auf<br />
der „+“-Seite des<br />
Servoweges in %<br />
Servoweg<br />
30 … 150 %<br />
PERIOD Zykluszeit in ms 10 oder 20 ms<br />
OUTPUT CH (Kanalauswahl)<br />
Wählen Sie ggf. mit den Auswahltasten die Zeile<br />
„OUTPUT CH“ an. Berühren Sie die SET-Taste der<br />
rechten Touch-Taste. Das Wertefeld wird invers dargestellt.<br />
Stellen Sie nun den gewünschten Kanal (z. B.<br />
01) mit den Auswahltasten der rechten Touch-Taste<br />
ein. Die nachfolgenden Parameter beziehen sich<br />
immer auf den hier eingestellten Kanal:<br />
Reverse (Servo-Umkehr)<br />
Stellt die Drehrichtung des an den gewählten Steuerkanal<br />
angeschlossenen Servos ein: ON / OFF<br />
CENTER (Servo-Mitte)<br />
In der Zeile „CENTER“ wird bei aktivem Wertefeld<br />
(inverse Darstellung) die aktuelle Impulszeit des in<br />
der Zeile „OUTPUT CH“ gewählten Steuerkanals in<br />
µs angezeigt.<br />
Der angezeigte Wert ist abhängig von der aktuellen<br />
Stellung des diesen Steuerkanal beeinflussenden<br />
Gebers <strong>und</strong> ggf. der Stellung von dessen Trimmung.<br />
Eine Kanalimpulszeit von 1500 µs entspricht der standardmäßigen<br />
Mittenposition <strong>und</strong> damit der üblichen<br />
Servomitte.<br />
Um diesen Wert zu verändern, wählen Sie die Zeile<br />
„CENTER“ an <strong>und</strong> berühren Sie die Taste SET. Nun<br />
bewegen Sie den entsprechenden Geber, Steuerknüppel<br />
<strong>und</strong>/oder Trimmrad in die gewünschte Position<br />
<strong>und</strong> speichern die aktuelle Geberpostion durch<br />
erneutes Antippen der Taste SET. Diese Position wird<br />
als neue Neutralposition abgespeichert.<br />
TRIM (Trimmposition)<br />
In der Zeile „TRIM“ können Sie die Neutralposition<br />
eines an den in der Zeile „OUTPUT CH“ gewählten<br />
Steuerkanal angeschlossenen Servos mittels der<br />
Auswahltasten der rechten Touch-Taste in 1-µs-<br />
Schritten feinfühlig nachjustieren: Um den hier eingestellten<br />
TRIM-Wert ist der Wert in der Zeile „CEN-<br />
TER“ im Bereich von ±120 µs anpassbar.<br />
Werkseinstellung: 0 µs.<br />
LIMIT–/+ (seitenabhängige Wegbegrenzung -/+)<br />
Diese Option dient zur Einstellung einer seitenabhängigen<br />
Begrenzung (Limitierung) des Servowegs<br />
(Ruderausschlag) des am in der Zeile „OUTPUT CH“<br />
gewählten Steuerkanal angeschlossenen Servos.<br />
Die Einstellung erfolgt getrennt für beide Richtungen<br />
im Bereich von 30 … 150 %.<br />
Werkseinstellung: je 150 %.<br />
PERIOD (Zykluszeit)<br />
In dieser Zeile bestimmen Sie den Zeitabstand der<br />
einzelnen Kanalimpulse. Diese Einstellung wird für<br />
alle Steuerkanäle übernommen.<br />
Bei ausschließlicher Verwendung von Digitalservos<br />
kann eine Zykluszeit von 10 ms eingestellt werden.<br />
Im Mischbetrieb oder bei ausschließlicher Verwendung<br />
von Analogservos sollte unbedingt 20 ms eingestellt<br />
sein, da letztere andernfalls „überfordert“ sein<br />
können <strong>und</strong> infolgedessen mit „Zittern“ oder „Knurren“<br />
reagieren.<br />
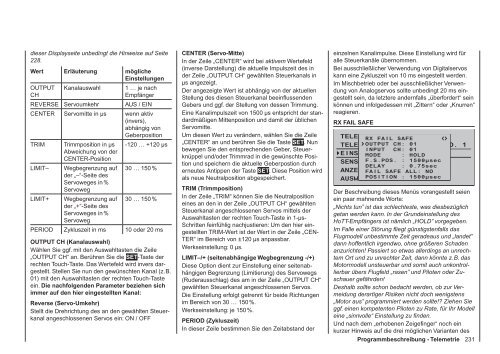
RX FAIL SAFE<br />
TELE RX FAIL SAFE<br />
TELE<br />
EINS<br />
OUTPUT CH: 01<br />
INPUT CH: 01<br />
MODE : HOLD<br />
D. 1<br />
SENS<br />
ANZE<br />
F.S.POS. : 1500µsec<br />
DELAY : 0.75sec<br />
FAIL SAFE ALL: NO<br />
AUSW POSITION : 1500µsec<br />
Der Beschreibung dieses Menüs vorangestellt seien<br />
ein paar mahnende Worte:<br />
„Nichts tun” ist das schlechteste, was diesbezüglich<br />
getan werden kann. In der Gr<strong>und</strong>einstellung des<br />
HoTT-Empfängers ist nämlich „HOLD” vorgegeben.<br />
Im Falle einer Störung fliegt günstigstenfalls das<br />
Flugmodell unbestimmte Zeit geradeaus <strong>und</strong> „landet”<br />
dann hoffentlich irgendwo, ohne größeren Schaden<br />
anzurichten! Passiert so etwas allerdings an unrechtem<br />
Ort <strong>und</strong> zu unrechter Zeit, dann könnte z. B. das<br />
Motormodell unsteuerbar <strong>und</strong> somit auch unkontrollierbar<br />
übers Flugfeld „rasen” <strong>und</strong> Piloten oder Zuschauer<br />
gefährden!<br />
Deshalb sollte schon bedacht werden, ob zur Vermeidung<br />
derartiger Risiken nicht doch wenigstens<br />
„Motor aus” programmiert werden sollte!? Ziehen Sie<br />
ggf. einen kompetenten Piloten zu Rate, für Ihr Modell<br />
eine „sinnvolle“ Einstellung zu finden.<br />
Und nach dem „erhobenen Zeigefinger“ noch ein<br />
kurzer Hinweis auf die drei möglichen Varianten des<br />
Programmbeschreibung - Telemetrie 231