(LiIo)- und Lithium-Polymer (LiPo) - Graupner
(LiIo)- und Lithium-Polymer (LiPo) - Graupner
(LiIo)- und Lithium-Polymer (LiPo) - Graupner

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Quer<br />
Höhe<br />
Seite<br />
Normal<br />
3<br />
100%<br />
SEL<br />
–––<br />
0%<br />
Gewünschten Schalter<br />
in die EIN Position<br />
(erw. Schalter: SET)<br />
SEL<br />
Wird auch ein Schalter zugewiesen, kann während<br />
des Fluges sogar zwischen 2 Dual-Rate-/Expo-Einstellungen<br />
umgeschaltet werden.<br />
Ähnliches gilt für die Option …<br />
»Kanal 1 Kurve« (Seite 128)<br />
Kanal 1 Kurve<br />
Eingang 0%<br />
Kurve Ausgang 0%<br />
aus Punkt ? 0%<br />
In dieser Option kann durch Setzen einer oder auch<br />
mehrerer Punkte die Steuerkurve des Gas-/Bremsknüppels<br />
so beeinflusst werden, dass ein angenehmes<br />
oder auch nur zweckentsprechendes Verhalten<br />
gewährleistet ist.<br />
Als Beispiel sei dazu der „tote“ Weg von Störklappen<br />
genannt. Die Klappen kommen dadurch erst nach<br />
einem gewissen „Leerweg“ des Bremsknüppels aus<br />
der Tragfläche. Durch entsprechendes „Verbiegen“<br />
der Kurve wird erreicht, dass der „tote“ Weg schneller<br />
zurückgelegt wird. Die Störklappen kommen so früher<br />
aus der Tragfläche heraus, der restliche Weg ist dann<br />
aber feinfühliger steuerbar. (Sinngemäß gilt dies<br />
natürlich genauso gut auch für die Steuerung eines<br />
Motors, der alternativ über K1 angesteuert wird.)<br />
� O U T P U T<br />
–<br />
100<br />
+<br />
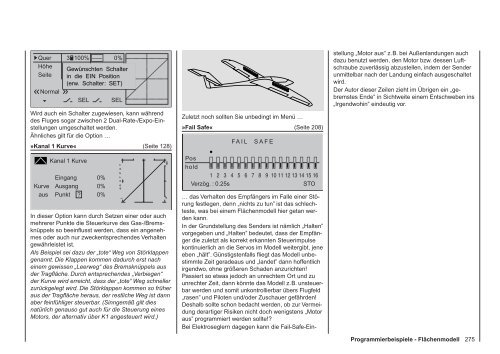
Zuletzt noch sollten Sie unbedingt im Menü …<br />
»Fail Safe« (Seite 208)<br />
FAIL SAFE<br />
Pos<br />
hold<br />
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16<br />
Verzög. : 0.25s STO<br />
… das Verhalten des Empfängers im Falle einer Störung<br />
festlegen, denn „nichts zu tun” ist das schlechteste,<br />
was bei einem Flächenmodell hier getan werden<br />
kann.<br />
In der Gr<strong>und</strong>stellung des Senders ist nämlich „Halten”<br />
vorgegeben <strong>und</strong> „Halten” bedeutet, dass der Empfänger<br />
die zuletzt als korrekt erkannten Steuerimpulse<br />
kontinuierlich an die Servos im Modell weitergibt, jene<br />
eben „hält”. Günstigstenfalls fliegt das Modell unbestimmte<br />
Zeit geradeaus <strong>und</strong> „landet” dann hoffentlich<br />
irgendwo, ohne größeren Schaden anzurichten!<br />
Passiert so etwas jedoch an unrechtem Ort <strong>und</strong> zu<br />
unrechter Zeit, dann könnte das Modell z. B. unsteuerbar<br />
werden <strong>und</strong> somit unkontrollierbar übers Flugfeld<br />
„rasen” <strong>und</strong> Piloten <strong>und</strong>/oder Zuschauer gefährden!<br />
Deshalb sollte schon bedacht werden, ob zur Vermeidung<br />
derartiger Risiken nicht doch wenigstens „Motor<br />
aus” programmiert werden sollte!?<br />
Bei Elektroseglern dagegen kann die Fail-Safe-Ein-<br />
stellung „Motor aus“ z. B. bei Außenlandungen auch<br />
dazu benutzt werden, den Motor bzw. dessen Luftschraube<br />
zuverlässig abzustellen, indem der Sender<br />
unmittelbar nach der Landung einfach ausgeschaltet<br />
wird.<br />
Der Autor dieser Zeilen zieht im Übrigen ein „gebremstes<br />
Ende“ in Sichtweite einem Entschweben ins<br />
„Irgendwohin“ eindeutig vor.<br />
Programmierbeispiele - Flächenmodell<br />
275