Analyse von Kraftsensor-Messwerten mit MATLAB zur Orts ... - Brichzin
Analyse von Kraftsensor-Messwerten mit MATLAB zur Orts ... - Brichzin
Analyse von Kraftsensor-Messwerten mit MATLAB zur Orts ... - Brichzin

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
3.2 Statische Messung - Auswertung und Ergebnisse der Messung 20<br />
Sensorspannung<br />
2,5<br />
2<br />
1,5<br />
1<br />
0,5<br />
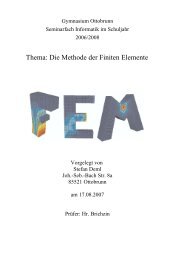
Diagramm 3-6: Kraftwerte in Abhängigkeit <strong>von</strong> y (bei x=68)<br />
Die Idee, den Ort zu berechnen war nun, motiviert durch die Linearität der<br />
Sensoren, für jeden Sensor eine Gleichung zu erstellen, die die Sensorspannung<br />
eines Sensors in Abhängigkeit des Ortes ausgibt. So<strong>mit</strong> hat man für jeden<br />
Messpunkt ein Gleichungssystem aus sechs Gleichungen <strong>mit</strong> zwei Unbekannten,<br />
x und y. Durch Einsetzen der sechs, an dem Messpunkt gemessenen, Kraftwerten<br />
und Lösen dieses überbestimmten Gleichungssystems lassen sich x und y<br />
er<strong>mit</strong>teln.<br />
Kraftwerte in Abhängigkeit <strong>von</strong> y (bei x=68)<br />
0<br />
90 100 110 120 130 140 150 160 170 180<br />
-0,5<br />
Ort vertikal<br />
Der nächste Schritt in der Auswertung war nun, diese Gleichungen zu finden. Da<br />
die Funktion die Form Sensorspan nung(<br />
x,<br />
y)<br />
haben soll, also die<br />
Sensorspannung in Abhängigkeit <strong>von</strong> x und y, wurde versucht, die Daten in genau<br />
dieser Form darzustellen, anders als in den bisherigen Graphen, in denen die Kraft<br />
nur jeweils in Abhängigkeit einer Koordinate dargestellt wurde, während die<br />
andere konstant war. Da dieses Diagramm aber einen Wert in Abhängigkeit <strong>von</strong><br />
zwei Eingabewerten darstellen soll, ist ein dreidimensionales Diagramm, bzw.<br />
zuerst eine dreidimensionale Wertetabelle wie in Tabelle 3-2, erforderlich.<br />
Diagramm 3-7 besitzt als Grundfläche die obere Plattenhälfte, die Achsen sind so<br />
angeordnet, dass ein Blickwinkel <strong>von</strong> oben senkrecht auf das Diagramm dem<br />
Blick des Fechters <strong>von</strong> vorne auf die Platte entspricht (beide erstellt in<br />
kraftverteilung_3D.xls). Alle Diagramme auf den folgenden Seiten zeigen<br />
stellvertretend für alle Sensoren die Werte des Sensors „ul“.<br />
ForceIn_ll<br />
ForceIn_lr<br />
ForceIn_ul<br />
ForceIn_ur<br />
ForceIn_ml<br />
ForceIn_mr