

PHD Thesis - Institute for Computer Graphics and Vision - Graz ...
PHD Thesis - Institute for Computer Graphics and Vision - Graz ...
PHD Thesis - Institute for Computer Graphics and Vision - Graz ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6.2. Piece-wise planar scene reconstruction 99<br />
(a) (b) (c) (d)<br />
(e) (f) (g) (h)<br />
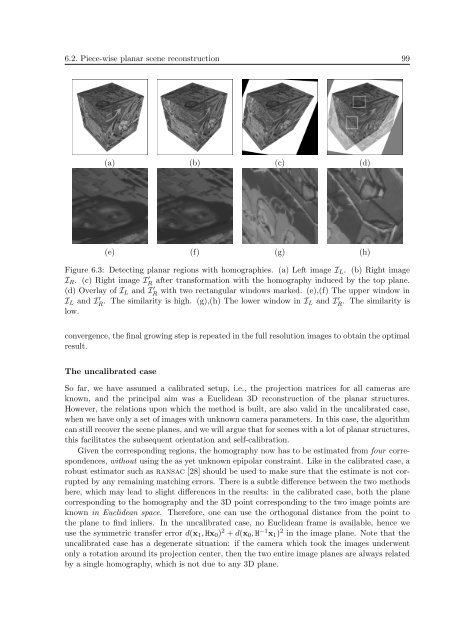
Figure 6.3: Detecting planar regions with homographies. (a) Left image I L . (b) Right image<br />
I R . (c) Right image I<br />
R ′ after trans<strong>for</strong>mation with the homography induced by the top plane.<br />
(d) Overlay of I L <strong>and</strong> I<br />
R ′ with two rectangular windows marked. (e),(f) The upper window in<br />
I L <strong>and</strong> I<br />
R ′ . The similarity is high. (g),(h) The lower window in I L <strong>and</strong> I<br />
R ′ . The similarity is<br />
low.<br />
convergence, the final growing step is repeated in the full resolution images to obtain the optimal<br />
result.<br />
The uncalibrated case<br />
So far, we have assumed a calibrated setup, i.e., the projection matrices <strong>for</strong> all cameras are<br />
known, <strong>and</strong> the principal aim was a Euclidean 3D reconstruction of the planar structures.<br />
However, the relations upon which the method is built, are also valid in the uncalibrated case,<br />
when we have only a set of images with unknown camera parameters. In this case, the algorithm<br />
can still recover the scene planes, <strong>and</strong> we will argue that <strong>for</strong> scenes with a lot of planar structures,<br />
this facilitates the subsequent orientation <strong>and</strong> self-calibration.<br />
Given the corresponding regions, the homography now has to be estimated from four correspondences,<br />
without using the as yet unknown epipolar constraint. Like in the calibrated case, a<br />
robust estimator such as ransac [28] should be used to make sure that the estimate is not corrupted<br />
by any remaining matching errors. There is a subtle difference between the two methods<br />
here, which may lead to slight differences in the results: in the calibrated case, both the plane<br />
corresponding to the homography <strong>and</strong> the 3D point corresponding to the two image points are<br />
known in Euclidean space. There<strong>for</strong>e, one can use the orthogonal distance from the point to<br />
the plane to find inliers. In the uncalibrated case, no Euclidean frame is available, hence we<br />
use the symmetric transfer error d(x 1 , Hx 0 ) 2 + d(x 0 , H −1 x 1 ) 2 in the image plane. Note that the<br />
uncalibrated case has a degenerate situation: if the camera which took the images underwent<br />
only a rotation around its projection center, then the two entire image planes are always related<br />
by a single homography, which is not due to any 3D plane.












