

PHD Thesis - Institute for Computer Graphics and Vision - Graz ...
PHD Thesis - Institute for Computer Graphics and Vision - Graz ...
PHD Thesis - Institute for Computer Graphics and Vision - Graz ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
HarrisAffinePoints / shape estimation<br />
HarrisAffinePoints / shape estimation<br />
3.4. Comparison of the described methods 41<br />
(a)<br />
(b)<br />
(c)<br />
(d)<br />
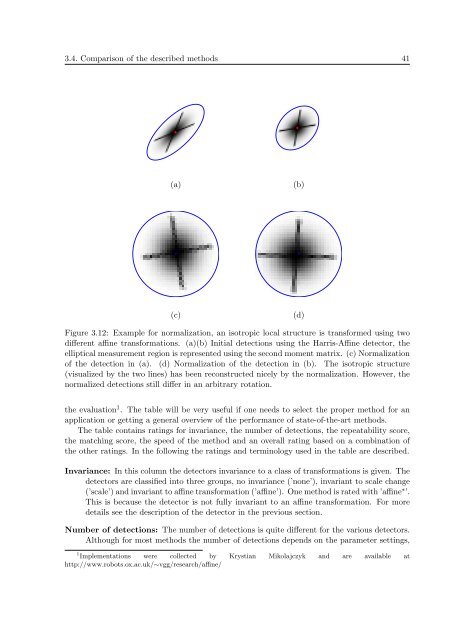
Figure 3.12: Example <strong>for</strong> normalization, an isotropic local structure is trans<strong>for</strong>med using two<br />
different affine trans<strong>for</strong>mations. (a)(b) Initial detections using the Harris-Affine detector, the<br />
elliptical measurement region is represented using the second moment matrix. (c) Normalization<br />
of the detection in (a). (d) Normalization of the detection in (b). The isotropic structure<br />
(visualized by the two lines) has been reconstructed nicely by the normalization. However, the<br />
normalized detections still differ in an arbitrary rotation.<br />
the evaluation 1 . The table will be very useful if one needs to select the proper method <strong>for</strong> an<br />
application or getting a general overview of the per<strong>for</strong>mance of state-of-the-art methods.<br />
The table contains ratings <strong>for</strong> invariance, the number of detections, the repeatability score,<br />
the matching score, the speed of the method <strong>and</strong> an overall rating based on a combination of<br />
the other ratings. In the following the ratings <strong>and</strong> terminology used in the table are described.<br />
Invariance: In this column the detectors invariance to a class of trans<strong>for</strong>mations is given. The<br />
detectors are classified into three groups, no invariance (’none’), invariant to scale change<br />
(’scale’) <strong>and</strong> invariant to affine trans<strong>for</strong>mation (’affine’). One method is rated with ’affine ∗ ’.<br />
This is because the detector is not fully invariant to an affine trans<strong>for</strong>mation. For more<br />
details see the description of the detector in the previous section.<br />
Number of detections: The number of detections is quite different <strong>for</strong> the various detectors.<br />
Although <strong>for</strong> most methods the number of detections depends on the parameter settings,<br />
1 Implementations were collected by Krystian Mikolajczyk <strong>and</strong> are available at<br />
http://www.robots.ox.ac.uk/∼vgg/research/affine/












