- Page 1 and 2:
Graz University of Technology Insti
- Page 3 and 4:
Abstract Visual map building and lo
- Page 5 and 6:
Contents 1 Introduction to mobile r
- Page 7 and 8:
CONTENTS vi 7.1.5 Sub-map linking .
- Page 9 and 10:
1.1. Localization and map building
- Page 11 and 12:
1.3. What has already been achieved
- Page 13 and 14:
1.5. How can it get solved? 6 fully
- Page 15 and 16:
1.6. Contribution of this thesis 8
- Page 17 and 18:
1.7. Structure of the thesis 10 com
- Page 19 and 20:
2.2. Localization from point featur
- Page 21 and 22:
2.2. Localization from point featur
- Page 23 and 24:
2.4. Localization from plane featur
- Page 25 and 26:
2.5. Summary 18 or not. Clearly thi
- Page 27 and 28:
Chapter 3 Local detectors Research
- Page 29 and 30:
3.1. Interest point detectors 22 fu
- Page 31 and 32:
3.2. Scale invariant detectors 24 r
- Page 33 and 34:
3.2. Scale invariant detectors 26 (
- Page 35 and 36:
3.2. Scale invariant detectors 28 3
- Page 37 and 38:
3.3. Affine invariant detectors 30
- Page 39 and 40:
3.3. Affine invariant detectors 32
- Page 41 and 42:
3.3. Affine invariant detectors 34
- Page 43 and 44:
3.3. Affine invariant detectors 36
- Page 45 and 46:
3.3. Affine invariant detectors 38
- Page 47 and 48:
3.4. Comparison of the described me
- Page 49 and 50:
3.4. Comparison of the described me
- Page 51 and 52:
44 But using a plane to plane homog
- Page 53 and 54:
4.2. Representation of the detectio
- Page 55 and 56:
4.3. Detection correspondence 48 th
- Page 57 and 58:
4.4. Point transfer using the trifo
- Page 59 and 60:
4.5. Ground truth generation 52 usi
- Page 61 and 62:
4.6. Experimental evaluation 54 Fig
- Page 63 and 64:
4.6. Experimental evaluation 56 rep
- Page 65 and 66:
4.6. Experimental evaluation 58 MSE
- Page 67 and 68:
4.6. Experimental evaluation 60 mat
- Page 69 and 70:
4.6. Experimental evaluation 62 vie
- Page 71 and 72:
4.6. Experimental evaluation 64 vie
- Page 73 and 74:
4.6. Experimental evaluation 66 rel
- Page 75 and 76:
Chapter 5 Maximally Stable Corner C
- Page 77 and 78:
5.1. The MSCC detector 70 (a) (b) (
- Page 79 and 80: 5.2. Region representation 72 400 (
- Page 81 and 82: 5.3. Computational complexity 74 6.
- Page 83 and 84: 5.5. Detection examples 76 paramete
- Page 85 and 86: 5.5. Detection examples 78 Figure 5
- Page 87 and 88: 5.6. Detector evaluation: Repeatabi
- Page 89 and 90: 5.7. Combining MSCC with other loca
- Page 91 and 92: 5.7. Combining MSCC with other loca
- Page 93 and 94: 5.7. Combining MSCC with other loca
- Page 95 and 96: 5.7. Combining MSCC with other loca
- Page 97 and 98: 5.7. Combining MSCC with other loca
- Page 99 and 100: 6.1. Wide-baseline region matching
- Page 101 and 102: 6.1. Wide-baseline region matching
- Page 103 and 104: 6.2. Piece-wise planar scene recons
- Page 105 and 106: 6.2. Piece-wise planar scene recons
- Page 107 and 108: 6.2. Piece-wise planar scene recons
- Page 109 and 110: 6.2. Piece-wise planar scene recons
- Page 111 and 112: 6.2. Piece-wise planar scene recons
- Page 113 and 114: 6.2. Piece-wise planar scene recons
- Page 115 and 116: 6.2. Piece-wise planar scene recons
- Page 117 and 118: Chapter 7 Living in a piecewise pla
- Page 119 and 120: 7.1. Map building 112 s,R,t sub-map
- Page 121 and 122: 7.1. Map building 114 x = (x 1 ...x
- Page 123 and 124: 7.1. Map building 116 distance is u
- Page 125 and 126: 7.1. Map building 118 normalization
- Page 127 and 128: 7.2. Localization 120 where N = |D
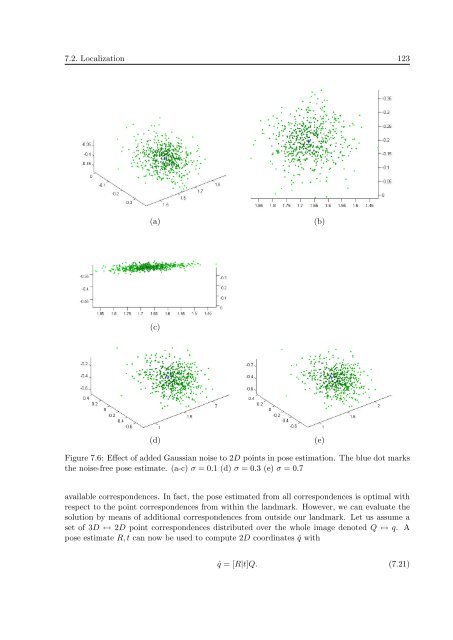
- Page 129: 7.2. Localization 122 registration
- Page 133 and 134: 7.2. Localization 126 3D structure
- Page 135 and 136: 7.2. Localization 128 other landmar
- Page 137 and 138: Chapter 8 Map building and localiza
- Page 139 and 140: 8.2. Map building experiments 132 8
- Page 141 and 142: 8.2. Map building experiments 134 D
- Page 143 and 144: 8.2. Map building experiments 136 (
- Page 145 and 146: 8.2. Map building experiments 138 F
- Page 147 and 148: 8.2. Map building experiments 140 F
- Page 149 and 150: 8.3. Localization experiments 142 8
- Page 151 and 152: 8.3. Localization experiments 144 F
- Page 153 and 154: 8.3. Localization experiments 146 F
- Page 155 and 156: 8.3. Localization experiments 148 8
- Page 157 and 158: 8.3. Localization experiments 150 (
- Page 159 and 160: Chapter 9 Conclusion More than 25 y
- Page 161 and 162: 9.1. Future work 154 Map building a
- Page 163 and 164: 9.1. Future work 156 information ca
- Page 165 and 166: A.1. Projective ellipse transfer 15
- Page 167 and 168: A.1. Projective ellipse transfer 16
- Page 169 and 170: A.2. Affine approximation of ellips
- Page 171 and 172: Appendix B The trifocal tensor and
- Page 173 and 174: Bibliography [1] S. Atiya and G. Ha
- Page 175 and 176: 168 [31] F. Fraundorfer and H. Bisc
- Page 177 and 178: 170 [61] U. Köthe. Edge and juncti
- Page 179 and 180: 172 [92] F. Schaffalitzky and A. Zi