

PHD Thesis - Institute for Computer Graphics and Vision - Graz ...
PHD Thesis - Institute for Computer Graphics and Vision - Graz ...
PHD Thesis - Institute for Computer Graphics and Vision - Graz ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
7.2. Localization 122<br />
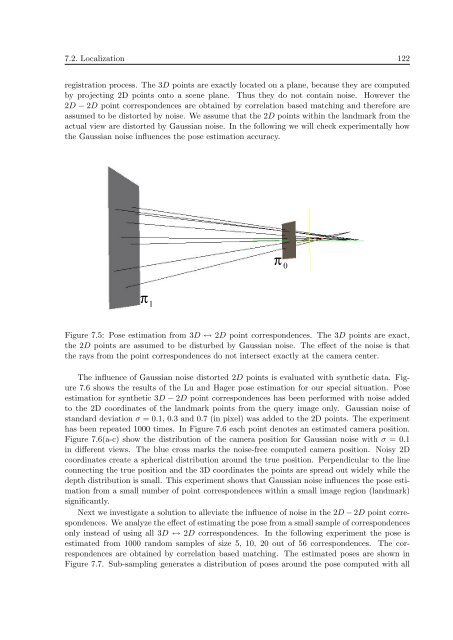
registration process. The 3D points are exactly located on a plane, because they are computed<br />
by projecting 2D points onto a scene plane. Thus they do not contain noise. However the<br />
2D − 2D point correspondences are obtained by correlation based matching <strong>and</strong> there<strong>for</strong>e are<br />
assumed to be distorted by noise. We assume that the 2D points within the l<strong>and</strong>mark from the<br />
actual view are distorted by Gaussian noise. In the following we will check experimentally how<br />
the Gaussian noise influences the pose estimation accuracy.<br />
π 0<br />
π 1<br />
Figure 7.5: Pose estimation from 3D ↔ 2D point correspondences. The 3D points are exact,<br />
the 2D points are assumed to be disturbed by Gaussian noise. The effect of the noise is that<br />
the rays from the point correspondences do not intersect exactly at the camera center.<br />
The influence of Gaussian noise distorted 2D points is evaluated with synthetic data. Figure<br />
7.6 shows the results of the Lu <strong>and</strong> Hager pose estimation <strong>for</strong> our special situation. Pose<br />
estimation <strong>for</strong> synthetic 3D − 2D point correspondences has been per<strong>for</strong>med with noise added<br />
to the 2D coordinates of the l<strong>and</strong>mark points from the query image only. Gaussian noise of<br />
st<strong>and</strong>ard deviation σ = 0.1, 0.3 <strong>and</strong> 0.7 (in pixel) was added to the 2D points. The experiment<br />
has been repeated 1000 times. In Figure 7.6 each point denotes an estimated camera position.<br />
Figure 7.6(a-c) show the distribution of the camera position <strong>for</strong> Gaussian noise with σ = 0.1<br />
in different views. The blue cross marks the noise-free computed camera position. Noisy 2D<br />
coordinates create a spherical distribution around the true position. Perpendicular to the line<br />
connecting the true position <strong>and</strong> the 3D coordinates the points are spread out widely while the<br />
depth distribution is small. This experiment shows that Gaussian noise influences the pose estimation<br />
from a small number of point correspondences within a small image region (l<strong>and</strong>mark)<br />
significantly.<br />
Next we investigate a solution to alleviate the influence of noise in the 2D − 2D point correspondences.<br />
We analyze the effect of estimating the pose from a small sample of correspondences<br />
only instead of using all 3D ↔ 2D correspondences. In the following experiment the pose is<br />
estimated from 1000 r<strong>and</strong>om samples of size 5, 10, 20 out of 56 correspondences. The correspondences<br />
are obtained by correlation based matching. The estimated poses are shown in<br />
Figure 7.7. Sub-sampling generates a distribution of poses around the pose computed with all












