

PHD Thesis - Institute for Computer Graphics and Vision - Graz ...
PHD Thesis - Institute for Computer Graphics and Vision - Graz ...
PHD Thesis - Institute for Computer Graphics and Vision - Graz ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
44<br />
But using a plane to plane homography limits the possible test cases to planar scenes only.<br />
Because of this limitation it is questionable if the results of previous detector evaluations will<br />
hold <strong>for</strong> realistic, non-planar scenes, especially <strong>for</strong> changing viewpoints. If interest regions are<br />
primarily detected on depth discontinuities <strong>and</strong> viewed from a different viewpoint the appearance<br />
changes significantly which will result in lower matching per<strong>for</strong>mance. There<strong>for</strong>e the results<br />
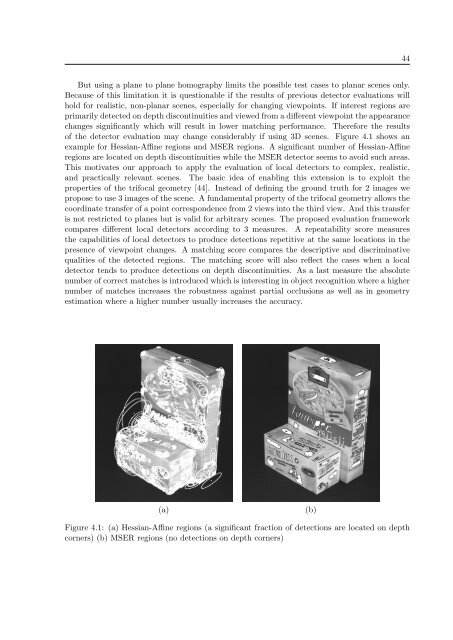
of the detector evaluation may change considerably if using 3D scenes. Figure 4.1 shows an<br />
example <strong>for</strong> Hessian-Affine regions <strong>and</strong> MSER regions. A significant number of Hessian-Affine<br />
regions are located on depth discontinuities while the MSER detector seems to avoid such areas.<br />
This motivates our approach to apply the evaluation of local detectors to complex, realistic,<br />
<strong>and</strong> practically relevant scenes. The basic idea of enabling this extension is to exploit the<br />
properties of the trifocal geometry [44]. Instead of defining the ground truth <strong>for</strong> 2 images we<br />
propose to use 3 images of the scene. A fundamental property of the trifocal geometry allows the<br />
coordinate transfer of a point correspondence from 2 views into the third view. And this transfer<br />
is not restricted to planes but is valid <strong>for</strong> arbitrary scenes. The proposed evaluation framework<br />
compares different local detectors according to 3 measures. A repeatability score measures<br />
the capabilities of local detectors to produce detections repetitive at the same locations in the<br />
presence of viewpoint changes. A matching score compares the descriptive <strong>and</strong> discriminative<br />
qualities of the detected regions. The matching score will also reflect the cases when a local<br />
detector tends to produce detections on depth discontinuities. As a last measure the absolute<br />
number of correct matches is introduced which is interesting in object recognition where a higher<br />
number of matches increases the robustness against partial occlusions as well as in geometry<br />
estimation where a higher number usually increases the accuracy.<br />
(a)<br />
(b)<br />
Figure 4.1: (a) Hessian-Affine regions (a significant fraction of detections are located on depth<br />
corners) (b) MSER regions (no detections on depth corners)












