digital compensation of dynamic acquisition errors at the front-end of ...
digital compensation of dynamic acquisition errors at the front-end of ...
digital compensation of dynamic acquisition errors at the front-end of ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
24 Chapter 2: Nonlinearity <strong>at</strong> <strong>the</strong> ADC’s Front-End<br />
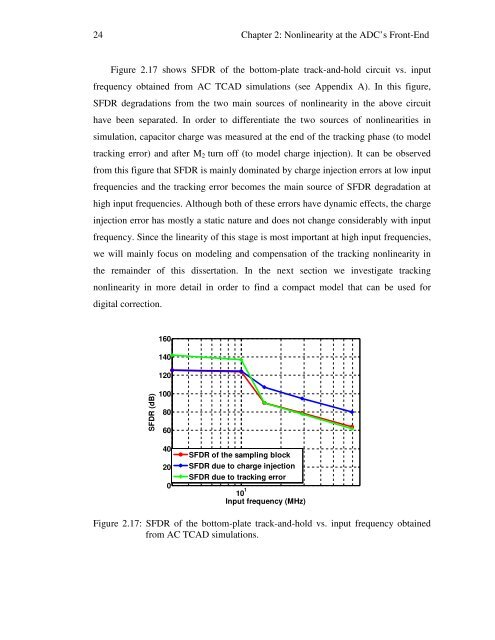
Figure 2.17 shows SFDR <strong>of</strong> <strong>the</strong> bottom-pl<strong>at</strong>e track-and-hold circuit vs. input<br />
frequency obtained from AC TCAD simul<strong>at</strong>ions (see App<strong>end</strong>ix A). In this figure,<br />
SFDR degrad<strong>at</strong>ions from <strong>the</strong> two main sources <strong>of</strong> nonlinearity in <strong>the</strong> above circuit<br />
have been separ<strong>at</strong>ed. In order to differenti<strong>at</strong>e <strong>the</strong> two sources <strong>of</strong> nonlinearities in<br />
simul<strong>at</strong>ion, capacitor charge was measured <strong>at</strong> <strong>the</strong> <strong>end</strong> <strong>of</strong> <strong>the</strong> tracking phase (to model<br />
tracking error) and after M 2 turn <strong>of</strong>f (to model charge injection). It can be observed<br />
from this figure th<strong>at</strong> SFDR is mainly domin<strong>at</strong>ed by charge injection <strong>errors</strong> <strong>at</strong> low input<br />
frequencies and <strong>the</strong> tracking error becomes <strong>the</strong> main source <strong>of</strong> SFDR degrad<strong>at</strong>ion <strong>at</strong><br />
high input frequencies. Although both <strong>of</strong> <strong>the</strong>se <strong>errors</strong> have <strong>dynamic</strong> effects, <strong>the</strong> charge<br />
injection error has mostly a st<strong>at</strong>ic n<strong>at</strong>ure and does not change considerably with input<br />
frequency. Since <strong>the</strong> linearity <strong>of</strong> this stage is most important <strong>at</strong> high input frequencies,<br />
we will mainly focus on modeling and <strong>compens<strong>at</strong>ion</strong> <strong>of</strong> <strong>the</strong> tracking nonlinearity in<br />
<strong>the</strong> remainder <strong>of</strong> this dissert<strong>at</strong>ion. In <strong>the</strong> next section we investig<strong>at</strong>e tracking<br />
nonlinearity in more detail in order to find a compact model th<strong>at</strong> can be used for<br />
<strong>digital</strong> correction.<br />
SFDR (dB)<br />
160<br />
140<br />
120<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
SFDR <strong>of</strong> <strong>the</strong> sampling block<br />
SFDR due to charge injection<br />
SFDR due to tracking error<br />
10 1<br />
Input frequency (MHz)<br />
Figure 2.17: SFDR <strong>of</strong> <strong>the</strong> bottom-pl<strong>at</strong>e track-and-hold vs. input frequency obtained<br />
from AC TCAD simul<strong>at</strong>ions.