MX510/MX512 Operator & Installation Manual - Simrad Professional ...
MX510/MX512 Operator & Installation Manual - Simrad Professional ...
MX510/MX512 Operator & Installation Manual - Simrad Professional ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
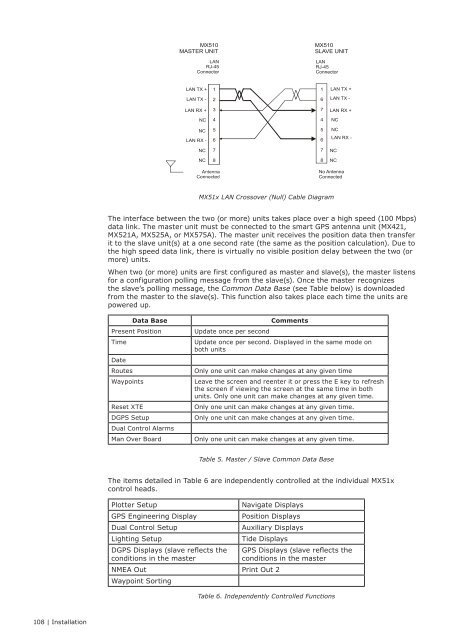
MX51x LAN Crossover (Null) Cable Diagram<br />
The interface between the two (or more) units takes place over a high speed (100 Mbps)<br />
data link. The master unit must be connected to the smart GPS antenna unit (MX421,<br />
MX521A, MX525A, or MX575A). The master unit receives the position data then transfer<br />
it to the slave unit(s) at a one second rate (the same as the position calculation). Due to<br />
the high speed data link, there is virtually no visible position delay between the two (or<br />
more) units.<br />
When two (or more) units are first configured as master and slave(s), the master listens<br />
for a configuration polling message from the slave(s). Once the master recognizes<br />
the slave’s polling message, the Common Data Base (see Table below) is downloaded<br />
from the master to the slave(s). This function also takes place each time the units are<br />
powered up.<br />
Data Base<br />
Present Position<br />
Time<br />
Date<br />
Routes<br />
Waypoints<br />
Reset XTE<br />
DGPS Setup<br />
Dual Control Alarms<br />
Man Over Board<br />
Update once per second<br />
Comments<br />
Update once per second. Displayed in the same mode on<br />
both units<br />
Only one unit can make changes at any given time<br />
Leave the screen and reenter it or press the E key to refresh<br />
the screen if viewing the screen at the same time in both<br />
units. Only one unit can make changes at any given time.<br />
Only one unit can make changes at any given time.<br />
Only one unit can make changes at any given time.<br />
Only one unit can make changes at any given time.<br />
Table 5. Master / Slave Common Data Base<br />
The items detailed in Table 6 are independently controlled at the individual MX51x<br />
control heads.<br />
Plotter Setup<br />
GPS Engineering Display<br />
Dual Control Setup<br />
Lighting Setup<br />
DGPS Displays (slave reflects the<br />
conditions in the master<br />
Navigate Displays<br />
Position Displays<br />
Auxiliary Displays<br />
Tide Displays<br />
NMEA Out Print Out 2<br />
Waypoint Sorting<br />
GPS Displays (slave reflects the<br />
conditions in the master<br />
Table 6. Independently Controlled Functions<br />
108 | <strong>Installation</strong>