

Where am I? Sensors and Methods for Mobile Robot Positioning
Where am I? Sensors and Methods for Mobile Robot Positioning
Where am I? Sensors and Methods for Mobile Robot Positioning

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 4: <strong>Sensors</strong> <strong>for</strong> Map-Based <strong>Positioning</strong> 115<br />
Laser-based continuous-wave (CW) ranging originated out of work per<strong>for</strong>med at the Stan<strong>for</strong>d<br />
Research Institute in the 1970s [Nitzan et al., 1977]. Range accuracies approach those of pulsed<br />
laser TOF methods. Only a slight advantage is gained over pulsed TOF rangefinding, however, since<br />
the time-measurement problem is replaced by the need <strong>for</strong> fairly sophisticated phase-measurement<br />
electronics [Depkovich <strong>and</strong> Wolfe, 1984]. Because of the limited in<strong>for</strong>mation obtainable from a<br />
single range point, laser-based systems are often scanned in one or more directions by either<br />
electromechanical or acousto-optical mechanisms.<br />
4.2.1 Odetics Scanning Laser Imaging System<br />
Odetics, Inc., Anaheim, CA, developed an adaptive <strong>and</strong> versatile scanning laser rangefinder in the<br />
early 1980s <strong>for</strong> use on ODEX 1, a six-legged walking robot [Binger <strong>and</strong> Harris, 1987; Byrd <strong>and</strong><br />
DeVries, 1990]. The system determines distance by phase-shift measurement, constructing threedimensional<br />
range pictures by panning <strong>and</strong> tilting the sensor across the field of view. The phase-shift<br />
measurement technique was selected over acoustic-ranging, stereo vision <strong>and</strong> structured light<br />
alternatives because of the inherent accuracy <strong>and</strong> fast update rate.<br />
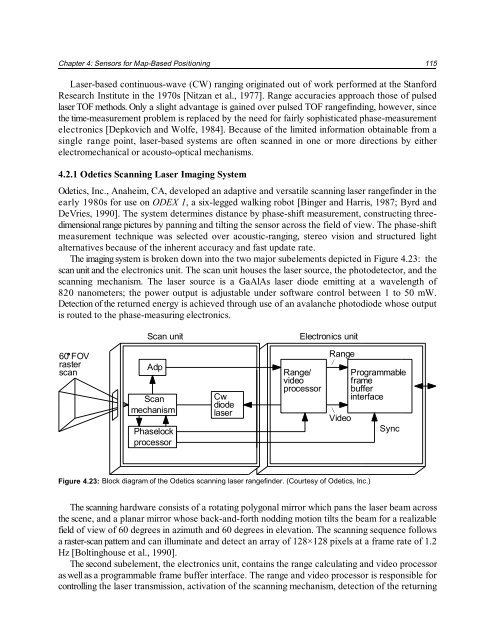
The imaging system is broken down into the two major subelements depicted in Figure 4.23: the<br />
scan unit <strong>and</strong> the electronics unit. The scan unit houses the laser source, the photodetector, <strong>and</strong> the<br />
scanning mechanism. The laser source is a GaAlAs laser diode emitting at a wavelength of<br />
820 nanometers; the power output is adjustable under software control between 1 to 50 mW.<br />
Detection of the returned energy is achieved through use of an avalanche photodiode whose output<br />
is routed to the phase-measuring electronics.<br />
Scan unit<br />
Electronics unit<br />
60 FOV<br />
raster<br />
scan<br />
Adp<br />
Scan<br />
mechanism<br />
Phaselock<br />
processor<br />
Cw<br />
diode<br />
laser<br />
Range/<br />
video<br />
processor<br />
Range<br />
Progr<strong>am</strong>mable<br />
fr<strong>am</strong>e<br />
buffer<br />
interface<br />
Video<br />
Sync<br />
Figure 4.23: Block diagr<strong>am</strong> of the Odetics scanning laser rangefinder. (Courtesy of Odetics, Inc.)<br />
The scanning hardware consists of a rotating polygonal mirror which pans the laser be<strong>am</strong> across<br />
the scene, <strong>and</strong> a planar mirror whose back-<strong>and</strong>-<strong>for</strong>th nodding motion tilts the be<strong>am</strong> <strong>for</strong> a realizable<br />
field of view of 60 degrees in azimuth <strong>and</strong> 60 degrees in elevation. The scanning sequence follows<br />
a raster-scan pattern <strong>and</strong> can illuminate <strong>and</strong> detect an array of 128×128 pixels at a fr<strong>am</strong>e rate of 1.2<br />
Hz [Boltinghouse et al., 1990].<br />
The second subelement, the electronics unit, contains the range calculating <strong>and</strong> video processor<br />
as well as a progr<strong>am</strong>mable fr<strong>am</strong>e buffer interface. The range <strong>and</strong> video processor is responsible <strong>for</strong><br />
controlling the laser transmission, activation of the scanning mechanism, detection of the returning














