

Where am I? Sensors and Methods for Mobile Robot Positioning
Where am I? Sensors and Methods for Mobile Robot Positioning
Where am I? Sensors and Methods for Mobile Robot Positioning

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
174 Part II Systems <strong>and</strong> <strong>Methods</strong> <strong>for</strong> <strong>Mobile</strong> <strong>Robot</strong> <strong>Positioning</strong><br />
7.1 Natural L<strong>and</strong>marks<br />
The main problem in natural l<strong>and</strong>mark navigation is to detect <strong>and</strong> match characteristic features from<br />
sensory inputs. The sensor of choice <strong>for</strong> this task is computer vision. Most computer vision-based<br />
natural l<strong>and</strong>marks are long vertical edges, such as doors <strong>and</strong> wall junctions, <strong>and</strong> ceiling lights.<br />
However, computer vision is an area that is too large <strong>and</strong> too diverse <strong>for</strong> the scope of this book. For<br />
this reason we will present below only one ex<strong>am</strong>ple of computer vision-based l<strong>and</strong>mark detection,<br />
but without going into great detail.<br />
When range sensors are used <strong>for</strong> natural l<strong>and</strong>mark navigation, distinct signatures, such as those<br />
of a corner or an edge, or of long straight walls, are good feature c<strong>and</strong>idates. The selection of<br />
features is important since it will determine the complexity in feature description, detection, <strong>and</strong><br />
matching. Proper selection of features will also reduce the chances <strong>for</strong> <strong>am</strong>biguity <strong>and</strong> increase<br />
positioning accuracy. A natural l<strong>and</strong>mark<br />
positioning system generally has the following<br />
basic components:<br />
& A sensor (usually computer vision) <strong>for</strong><br />
detecting l<strong>and</strong>marks <strong>and</strong> contrasting them<br />
against their background.<br />
& A method <strong>for</strong> matching observed features<br />
with a map of known l<strong>and</strong>marks.<br />
& A method of computing location <strong>and</strong><br />
localization errors from the matches.<br />
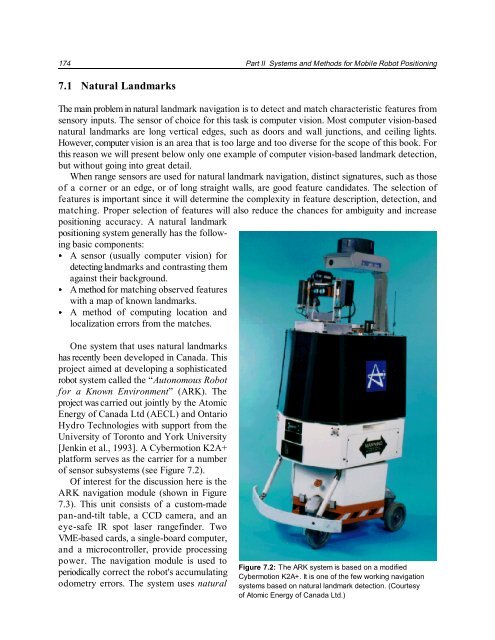
One system that uses natural l<strong>and</strong>marks<br />
has recently been developed in Canada. This<br />
project aimed at developing a sophisticated<br />
robot system called the “Autonomous <strong>Robot</strong><br />
<strong>for</strong> a Known Environment” (ARK). The<br />
project was carried out jointly by the Atomic<br />
Energy of Canada Ltd (AECL) <strong>and</strong> Ontario<br />
Hydro Technologies with support from the<br />
University of Toronto <strong>and</strong> York University<br />
[Jenkin et al., 1993]. A Cybermotion K2A+<br />
plat<strong>for</strong>m serves as the carrier <strong>for</strong> a number<br />
of sensor subsystems (see Figure 7.2).<br />
Of interest <strong>for</strong> the discussion here is the<br />
ARK navigation module (shown in Figure<br />
7.3). This unit consists of a custom-made<br />
pan-<strong>and</strong>-tilt table, a CCD c<strong>am</strong>era, <strong>and</strong> an<br />
eye-safe IR spot laser rangefinder. Two<br />
VME-based cards, a single-board computer,<br />
<strong>and</strong> a microcontroller, provide processing<br />
power. The navigation module is used to<br />
periodically correct the robot's accumulating<br />
odometry errors. The system uses natural<br />
Figure 7.2: The ARK system is based on a modified<br />
Cybermotion K2A+. It is one of the few working navigation<br />
systems based on natural l<strong>and</strong>mark detection. (Courtesy<br />
of Atomic Energy of Canada Ltd.)














