PA7300 Instruction Manual - TECO-Westinghouse Motor Company
PA7300 Instruction Manual - TECO-Westinghouse Motor Company
PA7300 Instruction Manual - TECO-Westinghouse Motor Company

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
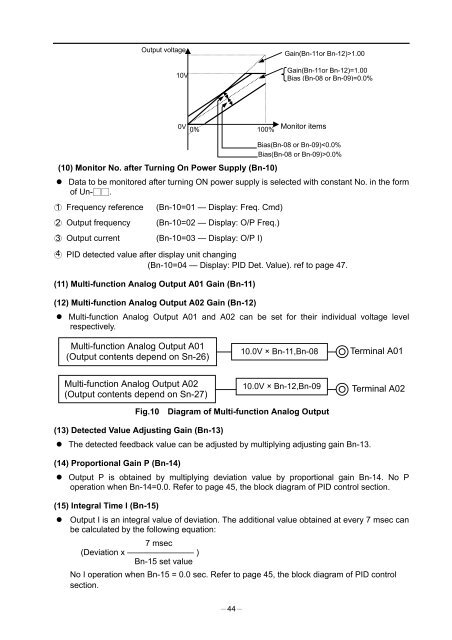
Output voltage10VGain(Bn-11or Bn-12)>1.00Gain(Bn-11or Bn-12)=1.00Bias (Bn-08 or Bn-09)=0.0%0V0% 100%Monitor items(10) Monitor No. after Turning On Power Supply (Bn-10)Data to be monitored after turning ON power supply is selected with constant No. in the formof Un-.1 Frequency reference2 Output frequency(Bn-10=01 — Display: Freq. Cmd)(Bn-10=02 — Display: O/P Freq.)3 Output current (Bn-10=03 — Display: O/P I)4 PID detected value after display unit changing(Bn-10=04 — Display: PID Det. Value). ref to page 47.(11) Multi-function Analog Output A01 Gain (Bn-11)Bias(Bn-08 or Bn-09)0.0%(12) Multi-function Analog Output A02 Gain (Bn-12)Multi-function Analog Output A01 and A02 can be set for their individual voltage levelrespectively.Multi-function Analog Output A01(Output contents depend on Sn-26)10.0V × Bn-11,Bn-08 Terminal A01Multi-function Analog Output A02(Output contents depend on Sn-27)10.0V × Bn-12,Bn-09 Terminal A02Fig.10 Diagram of Multi-function Analog Output(13) Detected Value Adjusting Gain (Bn-13)The detected feedback value can be adjusted by multiplying adjusting gain Bn-13.(14) Proportional Gain P (Bn-14)Output P is obtained by multiplying deviation value by proportional gain Bn-14. No Poperation when Bn-14=0.0. Refer to page 45, the block diagram of PID control section.(15) Integral Time I (Bn-15)Output I is an integral value of deviation. The additional value obtained at every 7 msec canbe calculated by the following equation:7 msec(Deviation x ———————— )Bn-15 set valueNo I operation when Bn-15 = 0.0 sec. Refer to page 45, the block diagram of PID controlsection.44