PA7300 Instruction Manual - TECO-Westinghouse Motor Company
PA7300 Instruction Manual - TECO-Westinghouse Motor Company
PA7300 Instruction Manual - TECO-Westinghouse Motor Company

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
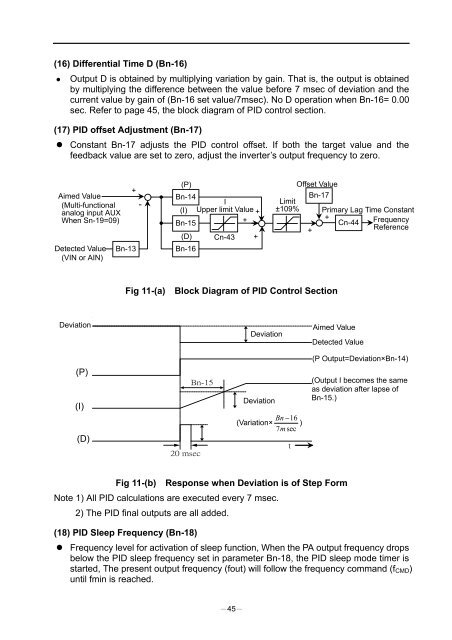
(16) Differential Time D (Bn-16) Output D is obtained by multiplying variation by gain. That is, the output is obtainedby multiplying the difference between the value before 7 msec of deviation and thecurrent value by gain of (Bn-16 set value/7msec). No D operation when Bn-16= 0.00sec. Refer to page 45, the block diagram of PID control section.(17) PID offset Adjustment (Bn-17)Constant Bn-17 adjusts the PID control offset. If both the target value and thefeedback value are set to zero, adjust the inverter’s output frequency to zero.Aimed Value(Multi-functionalanalog input AUXWhen Sn-19=09)Detected Value(VIN or AIN)Bn-13+-(P)Bn-14(I)IUpper limit Value +Bn-15+(D) Cn-43 +Bn-16Offset ValueBn-17Limit±109% Primary Lag Time Constant+Cn-44 Frequency+ReferenceFig 11-(a) Block Diagram of PID Control SectionDeviationDeviation Aimed ValueDetected Value(P Output=Deviation×Bn-14)(P)(I)(D)Deviation Bn −16(Variation× )7msec(Output I becomes the sameas deviation after lapse ofBn-15.)Fig 11-(b) Response when Deviation is of Step FormNote 1) All PID calculations are executed every 7 msec.2) The PID final outputs are all added.(18) PID Sleep Frequency (Bn-18)Frequency level for activation of sleep function, When the PA output frequency dropsbelow the PID sleep frequency set in parameter Bn-18, the PID sleep mode timer isstarted, The present output frequency (fout) will follow the frequency command (f CMD )until fmin is reached.45