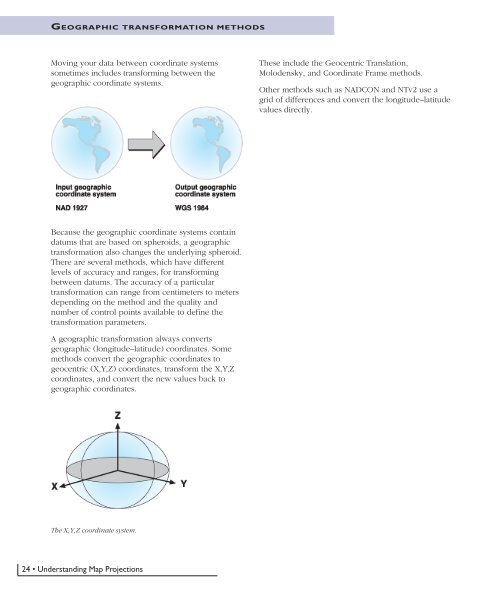
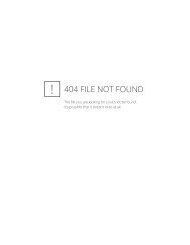
GEOGRAPHIC TRANSFORMATION METHODSMoving your data between coordinate systemssometimes includes transforming between thegeographic coordinate systems.These include the Geocentric Translation,Molodensky, and Coordinate Frame methods.Other methods such as NADCON and NTv2 use agrid of differences and convert the longitude–latitudevalues directly.Because the geographic coordinate systems containdatums that are based on spheroids, a geographictransformation also changes the underlying spheroid.There are several methods, which have differentlevels of accuracy and ranges, for transformingbetween datums. The accuracy of a particulartransformation can range from centimeters to metersdepending on the method and the quality andnumber of control points available to define thetransformation parameters.A geographic transformation always convertsgeographic (longitude–latitude) coordinates. Somemethods convert the geographic coordinates togeocentric (X,Y,Z) coordinates, transform the X,Y,Zcoordinates, and convert the new values back togeographic coordinates.The X,Y,Z coordinate system.24 • <strong>Understanding</strong> <strong>Map</strong> <strong>Projections</strong>
EQUATION-BASED METHODSThree-parameter methodsThe simplest datum transformation method is ageocentric, or three-parameter, transformation. Thegeocentric transformation models the differencesbetween two datums in the X,Y,Z coordinate system.One datum is defined with its center at 0,0,0. Thecenter of the other datum is defined at somedistance (∆X,∆Y,∆Z) in meters away.The rotation values are given in decimal seconds,while the scale factor is in parts per million (ppm).The rotation values are defined in two differentways. It’s possible to define the rotation angles aspositive either clockwise or counterclockwise as youlook toward the origin of the X,Y,Z systems.Usually the transformation parameters are defined asgoing ‘from’ a local datum ‘to’ WGS 1984 or anothergeocentric datum.⎡X⎤ ⎡∆X⎤ ⎡X⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢Y⎥ = ⎢∆Y⎥ + ⎢Y⎥⎣⎢Z⎦⎥ Z Znew ⎣⎢∆⎦⎥⎣⎢⎦⎥originalThe three parameters are linear shifts and are alwaysin meters.Seven-parameter methodsA more complex and accurate datum transformationis possible by adding four more parameters to ageocentric transformation. The seven parameters arethree linear shifts (∆X,∆Y,∆Z), three angular rotationsaround each axis (r x,r y,r z), and scale factor(s).⎡X⎤ ⎡∆X⎤ ⎡ 1 rz− r ⎤y ⎡X⎤⎢ ⎥ ⎢ ⎥ ⎢⎥ ⎢ ⎥⎢Y⎥ = ⎢∆Y⎥ + ( 1 + s)⋅⎢−rz1 rx⎥ ⋅ ⎢Y⎥⎣⎢Z⎦⎥ Zr r Znew ⎣⎢∆⎦⎥ ⎢⎣ y −⎥x 1⎦ ⎣⎢⎦⎥originalThe Coordinate Frame (or Bursa–Wolf) definition of therotation values.The equation in the previous column is how theUnited States and Australia define the equations andis called the Coordinate Frame Rotationtransformation. The rotations are positivecounterclockwise. Europe uses a differentconvention called the Position Vector transformation.Both methods are sometimes referred to as theBursa–Wolf method. In the Projection Engine, theCoordinate Frame and Bursa–Wolf methods are thesame. Both Coordinate Frame and Position Vectormethods are supported, and it is easy to converttransformation values from one method to the othersimply by changing the signs of the three rotationvalues. For example, the parameters to convert fromthe WGS 1972 datum to the WGS 1984 datum withthe Coordinate Frame method are (in the order, ∆X,∆Y,∆Z,r x,r y,r z,s):(0.0, 0.0, 4.5, 0.0, 0.0, -0.554, 0.227)To use the same parameters with the Position Vectormethod, change the sign of the rotation so the newparameters are:(0.0, 0.0, 4.5, 0.0, 0.0, +0.554, 0.227)Geographic transformations • 25