ÿþþ ÿ R O - C A N - I N T E R F A C E ...
ÿþþ ÿ R O - C A N - I N T E R F A C E ...
ÿþþ ÿ R O - C A N - I N T E R F A C E ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
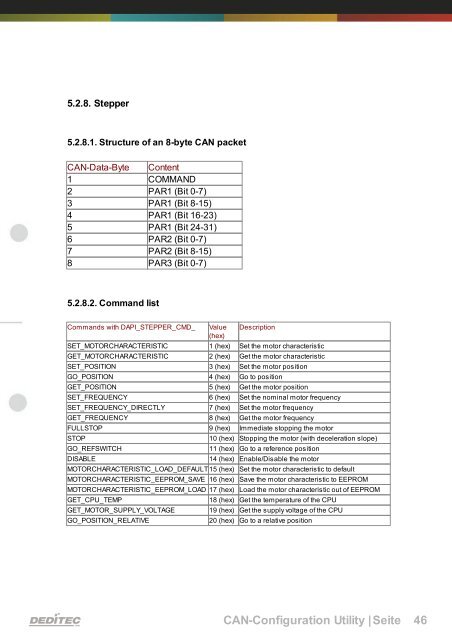
5.2.8. Stepper<br />
5.2.8.1. Structure of an 8-byte CAN packet<br />
CAN-Data-Byte Content<br />
1 COMMAND<br />
2 PAR1 (Bit 0-7)<br />
3 PAR1 (Bit 8-15)<br />
4 PAR1 (Bit 16-23)<br />
5 PAR1 (Bit 24-31)<br />
6 PAR2 (Bit 0-7)<br />
7 PAR2 (Bit 8-15)<br />
8 PAR3 (Bit 0-7)<br />
5.2.8.2. Command list<br />
Commands with DAPI_STEPPER_CMD_ Value<br />
(hex)<br />
Description<br />
SET_MOTORCHARACTERISTIC 1 (hex) Set the motor characteristic<br />
GET_MOTORCHARACTERISTIC 2 (hex) Get the motor characteristic<br />
SET_POSITION 3 (hex) Set the motor position<br />
GO_POSITION 4 (hex) Go to position<br />
GET_POSITION 5 (hex) Get the motor position<br />
SET_FREQUENCY 6 (hex) Set the nominal motor frequency<br />
SET_FREQUENCY_DIRECTLY 7 (hex) Set the motor frequency<br />
GET_FREQUENCY 8 (hex) Get the motor frequency<br />
FULLSTOP 9 (hex) Immediate stopping the motor<br />
STOP 10 (hex) Stopping the motor (with deceleration slope)<br />
GO_REFSWITCH 11 (hex) Go to a reference position<br />
DISABLE 14 (hex) Enable/Disable the motor<br />
MOTORCHARACTERISTIC_LOAD_DEFAULT 15 (hex) Set the motor characteristic to default<br />
MOTORCHARACTERISTIC_EEPROM_SAVE 16 (hex) Save the motor characteristic to EEPROM<br />
MOTORCHARACTERISTIC_EEPROM_LOAD 17 (hex) Load the motor characteristic out of EEPROM<br />
GET_CPU_TEMP 18 (hex) Get the temperature of the CPU<br />
GET_MOTOR_SUPPLY_VOLTAGE 19 (hex) Get the supply voltage of the CPU<br />
GO_POSITION_RELATIVE 20 (hex) Go to a relative position<br />
CAN-Configuration Utility |Seite 46