ÿþþ ÿ R O - C A N - I N T E R F A C E ...
ÿþþ ÿ R O - C A N - I N T E R F A C E ...
ÿþþ ÿ R O - C A N - I N T E R F A C E ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
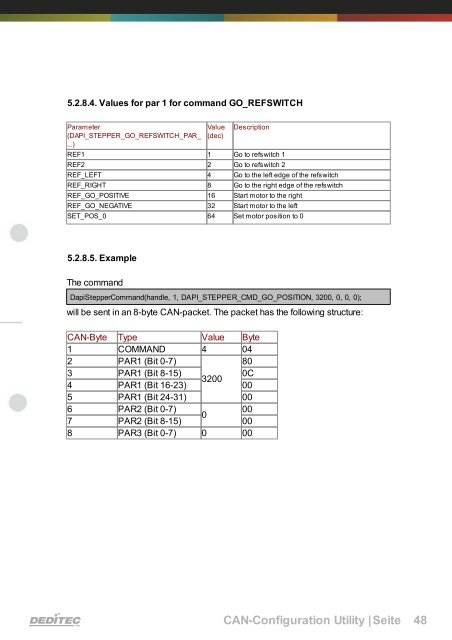
5.2.8.4. Values for par 1 for command GO_REFSWITCH<br />
Parameter<br />
(DAPI_STEPPER_GO_REFSWITCH_PAR_<br />
...)<br />
Value<br />
(dec)<br />
Description<br />
REF1 1 Go to refswitch 1<br />
REF2 2 Go to refswitch 2<br />
REF_LEFT 4 Go to the left edge of the refswitch<br />
REF_RIGHT 8 Go to the right edge of the refswitch<br />
REF_GO_POSITIVE 16 Start motor to the right<br />
REF_GO_NEGATIVE 32 Start motor to the left<br />
SET_POS_0 64 Set motor position to 0<br />
5.2.8.5. Example<br />
The command<br />
DapiStepperCommand(handle, 1, DAPI_STEPPER_CMD_GO_POSITION, 3200, 0, 0, 0);<br />
will be sent in an 8-byte CAN-packet. The packet has the following structure:<br />
CAN-Byte Type Value Byte<br />
1 COMMAND 4 04<br />
2 PAR1 (Bit 0-7)<br />
80<br />
3<br />
4<br />
PAR1 (Bit 8-15)<br />
PAR1 (Bit 16-23)<br />
3200<br />
0C<br />
00<br />
5 PAR1 (Bit 24-31) 00<br />
6<br />
7<br />
PAR2 (Bit 0-7)<br />
PAR2 (Bit 8-15)<br />
0<br />
00<br />
00<br />
8 PAR3 (Bit 0-7) 0 00<br />
CAN-Configuration Utility |Seite 48