

Bayesian Programming and Learning for Multi-Player Video Games ...
Bayesian Programming and Learning for Multi-Player Video Games ...
Bayesian Programming and Learning for Multi-Player Video Games ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
μ<br />
σ<br />
K'<br />
K'<br />
EC t<br />
EU<br />
Q<br />
Army mixture<br />
(GMM)<br />
What we infer<br />
V'<br />
ETT<br />
What we see What we want to know<br />
EU<br />
What we want<br />
to do (tactics)<br />
U<br />
K'<br />
K' K K<br />
V<br />
EC t<br />
K<br />
EC t+1 C c<br />
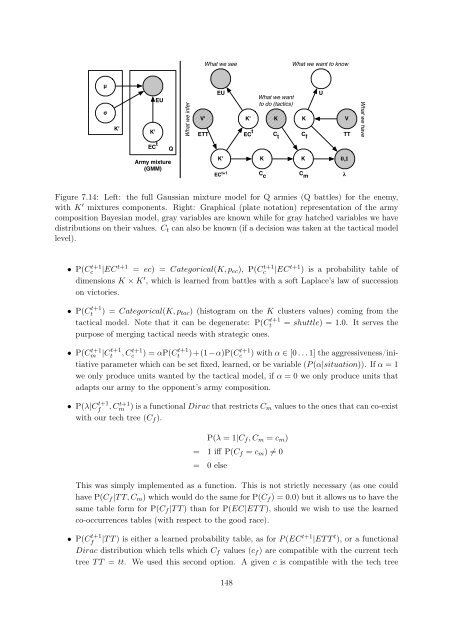
Figure 7.14: Left: the full Gaussian mixture model <strong>for</strong> Q armies (Q battles) <strong>for</strong> the enemy,<br />
with K ′ mixtures components. Right: Graphical (plate notation) representation of the army<br />
composition <strong>Bayesian</strong> model, gray variables are known while <strong>for</strong> gray hatched variables we have<br />
distributions on their values. Ct can also be known (if a decision was taken at the tactical model<br />
level).<br />
• P(C t+1<br />
c |EC t+1 = ec) = Categorical(K, pec), P(C t+1<br />
c |EC t+1 ) is a probability table of<br />
dimensions K × K ′ , which is learned from battles with a soft Laplace’s law of succession<br />
on victories.<br />
• P(C t+1<br />
t ) = Categorical(K, ptac) (histogram on the K clusters values) coming from the<br />
tactical model. Note that it can be degenerate: P(C t+1<br />
t = shuttle) = 1.0. It serves the<br />
purpose of merging tactical needs with strategic ones.<br />
• P(C t+1<br />
m |C t+1<br />
t<br />
, C t+1<br />
c ) = αP(C t+1<br />
t )+(1−α)P(Ct+1 c ) with α ∈ [0 . . . 1] the aggressiveness/ini-<br />
tiative parameter which can be set fixed, learned, or be variable (P (α|situation)). If α = 1<br />
we only produce units wanted by the tactical model, if α = 0 we only produce units that<br />
adapts our army to the opponent’s army composition.<br />
• P(λ|C t+1<br />
f , C t+1<br />
m ) is a functional Dirac that restricts Cm values to the ones that can co-exist<br />
with our tech tree (Cf ).<br />
C t<br />
P(λ = 1|Cf , Cm = cm)<br />
= 1 iff P(Cf = cm) �= 0<br />
= 0 else<br />
This was simply implemented as a function. This is not strictly necessary (as one could<br />
have P(Cf |T T, Cm) which would do the same <strong>for</strong> P(Cf ) = 0.0) but it allows us to have the<br />
same table <strong>for</strong>m <strong>for</strong> P(Cf |T T ) than <strong>for</strong> P(EC|ET T ), should we wish to use the learned<br />
co-occurrences tables (with respect to the good race).<br />
• P(C t+1<br />
f |T T ) is either a learned probability table, as <strong>for</strong> P (EC t+1 |ET T t ), or a functional<br />
Dirac distribution which tells which Cf values (cf ) are compatible with the current tech<br />
tree T T = tt. We used this second option. A given c is compatible with the tech tree<br />
148<br />
C f<br />
K<br />
C m<br />
TT<br />
0,1<br />
λ<br />
What we have