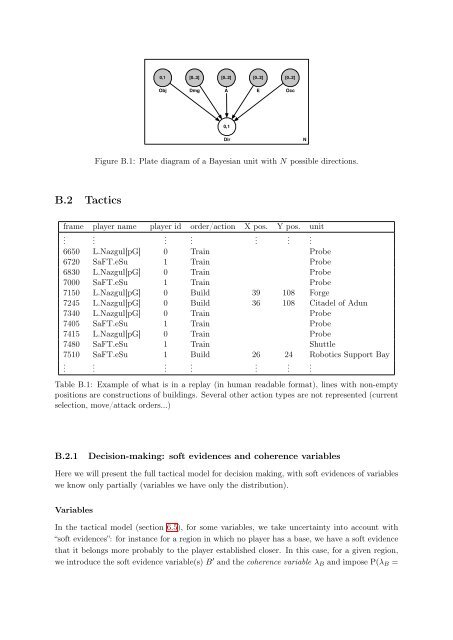
B.2 Tactics 0,1 Obj [0..3] Dmg [0..2] A 0,1 Dir Figure B.1: Plate diagram of a <strong>Bayesian</strong> unit with N possible directions. frame player name player id order/action X pos. Y pos. unit . . . . . . . 6650 L.Nazgul[pG] 0 Train Probe 6720 SaFT.eSu 1 Train Probe 6830 L.Nazgul[pG] 0 Train Probe 7000 SaFT.eSu 1 Train Probe 7150 L.Nazgul[pG] 0 Build 39 108 Forge 7245 L.Nazgul[pG] 0 Build 36 108 Citadel of Adun 7340 L.Nazgul[pG] 0 Train Probe 7405 SaFT.eSu 1 Train Probe 7415 L.Nazgul[pG] 0 Train Probe 7480 SaFT.eSu 1 Train Shuttle 7510 SaFT.eSu 1 Build 26 24 Robotics Support Bay . . . . Table B.1: Example of what is in a replay (in human readable <strong>for</strong>mat), lines with non-empty positions are constructions of buildings. Several other action types are not represented (current selection, move/attack orders...) B.2.1 Decision-making: soft evidences <strong>and</strong> coherence variables Here we will present the full tactical model <strong>for</strong> decision making, with soft evidences of variables we know only partially (variables we have only the distribution). Variables In the tactical model (section 6.5), <strong>for</strong> some variables, we take uncertainty into account with “soft evidences”: <strong>for</strong> instance <strong>for</strong> a region in which no player has a base, we have a soft evidence that it belongs more probably to the player established closer. In this case, <strong>for</strong> a given region, we introduce the soft evidence variable(s) B ′ <strong>and</strong> the coherence variable λB <strong>and</strong> impose P(λB = [0..2] . E [0..2] Occ . N .
1|B, B ′ ) = 1.0 iff B = B ′ , else P(λB = 1|B, B ′ ) = 0.0; while P(λB|B, B ′ )P(B ′ ) is a new factor in the joint distribution. This allows to sum over P(B ′ ) distribution (soft evidence). We do that <strong>for</strong> all the variables which will not be directly observed in decision-making. Decomposition The joint distribution of our model contains soft evidence variables <strong>for</strong> all input family variables (E, T, B, GD, AD, ID) as we cannot know <strong>for</strong> sure the economical values of the opponent’s regions under the fog of war* (E), nor can we know exactly the tactical value (T ) <strong>for</strong> them, nor the possession of the regions (B), nor the exact defensive scores (GD, AD, ID). Under this <strong>for</strong>m, it deals with all possible uncertainty (from incomplete in<strong>for</strong>mation) that may come up in a game. For the n considered regions, we have: Forms = P(A1:n, E1:n, T1:n, T A1:n, B1:n, B ′ 1:n, λB,1:n, T ′ 1:n, λT,1:n, (B.1) E ′ 1:n, λE,1:n, ID ′ 1:n, λID,1:n, GD ′ 1:n, λGD,1:n, AD ′ 1:n, λAD,1:n, (B.2) H1:n, GD1:n, AD1:n, ID1:n, HP, T T ) (B.3) n� [P(Ai)P(Ei, Ti, T Ai, Bi|Ai) (B.4) i=1 P(λB,i|B1:n, B ′ 1:n)P(B ′ 1:n)P(λT,i|T1:n, T ′ 1:n)P(T ′ 1:n) (B.5) P(λE,i|E1:n, E ′ 1:n)P(E ′ 1:n)P(λID,i|ID1:n, ID ′ 1:n)P(ID ′ 1:n) (B.6) P(λGD,i|GD1:n, GD ′ 1:n)P(GD ′ 1:n)P(λAD,i|AD1:n, AD ′ 1:n)P(AD ′ 1:n) (B.7) P(ADi, GDi, IDi|Hi)P(Hi|HP )] P(HP |T T )P(T T ) (B.8) The full plate diagram of this model is shown in Figure B.6. To the previous <strong>for</strong>ms (section 6.5.1), we add <strong>for</strong> all variables which were doubles (X with X ′ ): ⎧ ⎨ Identification P(λX|X, X ′ ) = 1.0 iff X = X ′ ⎩P(λX|X, X ′ ) = 0.0 else The identification <strong>and</strong> learning does not change, c.f. section 6.5.1. Questions ∝ ∝ ∀i ∈ regions P(Ai|tai, λB,i = 1, λT,i = 1, λE,i = 1) � � � B i,B ′ i T i,T ′ i E i,E ′ i P(Ei, Ti, tai, Bi|Ai)P(Ai)P(B ′ i)P(T ′ i )P(E ′ i) ∀i ∈ regions P(Hi|tt, λID,i = 1, λGD,i = 1, λAD,i = 1) � � � � ID i,ID ′ i GD i,GD ′ i ADi,AD ′ i HP P(ADi, GDi, IDi|Hi)P(Hi|HP )P(HP |tt)P(ID ′ i)P(AD ′ i)P(GD ′ i) 199
- Page 1:
THÈSE Pour obtenir le grade de DOC
- Page 4 and 5:
Contents Contents 4 1 Introduction
- Page 6 and 7:
5.4.1 Bayesian unit . . . . . . . .
- Page 8 and 9:
Notations Symbols ← assignment of
- Page 10 and 11:
Complexity, real-time constraints a
- Page 12 and 13:
intuition of Bayesian modeling to r
- Page 14 and 15:
e played by humans, by opposition t
- Page 16 and 17:
As a first approach, programmers ca
- Page 18 and 19:
3 2 1 1 Figure 2.1: A Tic-tac-toe b
- Page 20 and 21:
Algorithm 2 Alpha-beta algorithm fu
- Page 22 and 23:
ewards on all the runs through node
- Page 24 and 25:
2.4.1 Monopoly In Monopoly, there i
- Page 26 and 27:
2.4.3 Poker Poker 4 is a zero-sum (
- Page 28 and 29:
2.5.2 State of the art FPS AI consi
- Page 30 and 31:
2.6.2 State of the art Methods used
- Page 32 and 33:
are no generic and efficient approa
- Page 34 and 35:
Strategy Tactics Action Strategic d
- Page 36 and 37:
2.8.4 Time constant(s) For novice t
- Page 38 and 39:
effects. In RTS games, there is a l
- Page 41 and 42:
Chapter 3 Bayesian modeling of mult
- Page 43 and 44:
programmer-specified states, the (m
- Page 45 and 46:
which derives the laws of probabili
- Page 47 and 48:
Indeed, when evaluating two models
- Page 49 and 50:
• energy/mana/stamina regenerator
- Page 51 and 52:
• The probability that the ith un
- Page 53 and 54:
3.3.4 Example This model has been a
- Page 55 and 56:
and P(Ai = false|T = i) = 0.6. To m
- Page 57 and 58:
Chapter 4 RTS AI: StarCraft: Broodw
- Page 59 and 60:
eplay is shown in appendix in Table
- Page 61 and 62:
Supply/Max supply Build Note (popul
- Page 63 and 64:
Figure 4.3: Military moves from a S
- Page 65 and 66:
Technology Strategy Army How? Econo
- Page 67:
• Robotic player (bot): chapter 8
- Page 70 and 71:
• Complexity: pspace-complete [Pa
- Page 72 and 73:
educing the complexity (no communic
- Page 74 and 75:
(grid-based) pathfinding was recent
- Page 76 and 77:
U A E Figure 5.4: In both figures,
- Page 78 and 79:
Fire Reload Figure 5.6: Fight FSM o
- Page 80 and 81:
• Obj i∈�1...n� ∈ {T rue,
- Page 82 and 83:
Identification Parameters and proba
- Page 84 and 85:
⎧⎪ Bayesian program ⎨ ⎧⎪
- Page 86 and 87:
36 units setup vs OAI. For Bayesian
- Page 88 and 89:
we learned, by optimizing the effic
- Page 90 and 91:
Probabilistic modality Finally, we
- Page 92 and 93:
• Type: prediction is problem of
- Page 94 and 95:
can possibly be in the future. In t
- Page 96 and 97:
6.3.2 Evaluating regions Partial ob
- Page 98 and 99:
Pylon Gate Core Range Gate Core Pyl
- Page 100 and 101:
events (detected by a heuristic, se
- Page 102 and 103:
• AD1:n ∈ {no, low, med, high}:
- Page 104 and 105:
The model is highly modular, and so
- Page 106 and 107:
attacked: P(ei�=r, ti�=r, tai
- Page 108 and 109:
Figure 6.7: P(A) for varying values
- Page 110 and 111:
Towards a baseline heuristic The me
- Page 112 and 113:
Figure 6.9 displays the mean P(A, H
- Page 114 and 115:
Finally, our approach is not exclus
- Page 117 and 118:
Chapter 7 Strategy Strategy without
- Page 119 and 120:
etween economy, technology and mili
- Page 121 and 122:
power to the player (it allows for
- Page 123 and 124:
7.4.2 Probabilistic labeling Instea
- Page 125 and 126:
• Variables: - X i∈�1...n�
- Page 127 and 128:
Figure 7.3: Protoss vs Terran distr
- Page 129 and 130:
7.5 Build tree prediction The work
- Page 131 and 132:
Questions The question that we will
- Page 133 and 134:
Table 7.4 shows the full results, t
- Page 135 and 136:
that this average “missed” (unp
- Page 137 and 138:
7.6 Openings 7.6.1 Bayesian model W
- Page 139 and 140:
Questions The question that we will
- Page 141 and 142:
Figure 7.12: Evolution of P(Opening
- Page 143 and 144:
Table 7.5: Prediction probabilities
- Page 145 and 146:
7.6.3 Possible uses We recall that
- Page 147 and 148: • U t+1 ∈ ([0, 1] . . . [0, 1])
- Page 149 and 150: (tt) if it allows for building all
- Page 151 and 152: 7.7.2 Results We did not evaluate d
- Page 153 and 154: forces scores PvP PvT PvZ TvT TvZ Z
- Page 155 and 156: shows a brutal transition from the
- Page 157 and 158: Chapter 8 BroodwarBotQ Dealing with
- Page 159 and 160: 8.1.2 Tactical goals The decision t
- Page 161 and 162: • X t i∈�1...n� ∈ �r1 .
- Page 163 and 164: 3 2 player 1 1 6 4 resources 8 play
- Page 165 and 166: the construction plan as our Produc
- Page 167 and 168: Figure 8.5: Crops of screenshots of
- Page 169: anking). We consider that this rati
- Page 172 and 173: This is an extension of the work on
- Page 174 and 175: • differences in situations: as t
- Page 176 and 177: 9.2.4 Inter-game Adaptation (Meta-g
- Page 178 and 179: fog of war hiding of some of the fe
- Page 180 and 181: RTS Real-Time Strategy games are (m
- Page 182 and 183: Sander C. J. Bakkes, Pieter H. M. S
- Page 184 and 185: Julien Diard, Pierre Bessière, and
- Page 186 and 187: Damian Isla. Handling complexity in
- Page 188 and 189: Kinshuk Mishra, Santiago Ontañón,
- Page 190 and 191: Mark Riedl, Boyang Li, Hua Ai, and
- Page 192 and 193: Adrien Treuille, Seth Cooper, and Z
- Page 194 and 195: • 0 (not at all, or irrelevant)
- Page 197: Appendix B StarCraft AI B.1 Micro-m
- Page 201 and 202: Figure B.2: Top: StarCraft’s Lost
- Page 203 and 204: 0,1 B' [0..5] T [0..2] E' 0,1 λ B
- Page 205 and 206: C C A A C C A A 4 B B 4 3 4 B B 4 3