Prosthetic Arm Force Reducer Team 1 – Halliday's ... - Ohio University
Prosthetic Arm Force Reducer Team 1 – Halliday's ... - Ohio University
Prosthetic Arm Force Reducer Team 1 – Halliday's ... - Ohio University

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
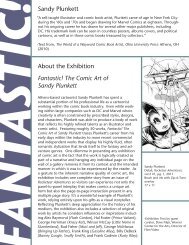
Figure 5.1.2 <strong>–</strong> Solid Edge Model of Refined Hook Concept<br />
Shown above is the second iteration of the hook concept. The movable jaw feature has been<br />
eliminated from this design and a different approach to the vector system has been implemented.<br />
Rather than use a “screw” to adjust the vector position of the hook, the body of the book has<br />
been drilled out in three places to allow for three potential locations of spring placement. The<br />
lever on the left side of the hook can be pulled outward and then slid and released into the<br />
appropriate location.<br />
5.1.2 Concept B <strong>–</strong> Otto Bock Model 10A60 Vector Hook<br />
During the design of our own vector hook system it was discovered that there was a pre-existing<br />
hook of very similar operation. The Otto Bock Model 10A60 shown below incorporates and 2setting<br />
vector system.<br />
Figure 5.1.3 <strong>–</strong> Otto Bock Model 10A60 Vector Hook<br />
19