DATA SHEET - IEETA
DATA SHEET - IEETA
DATA SHEET - IEETA

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Philips Semiconductors Product specification<br />
8-bit microcontroller with on-chip CAN P8xC592<br />
handbook, full pagewidth<br />
address<br />
data<br />
INTERFACE<br />
MANAGEMENT<br />
LOGIC<br />
TRANSMIT<br />
BUFFER<br />
ON - CHIP<br />
RECEIVE<br />
BUFFER 0<br />
RECEIVE<br />
BUFFER 1<br />
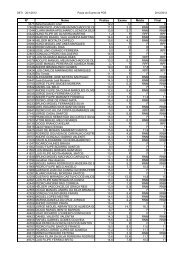
Fig.14 Block diagram of the P8xC592 on-chip CAN-controller.<br />
Table 29 Hardware blocks of the CAN-controller (see Fig.14)<br />
NAME BLOCK DESCRIPTION<br />
Interface Management Logic IML Interprets commands from the CPU, allocates the message buffers<br />
(TBF, RBF0 and RBF1) and provides interrupts and status information to the<br />
microcontroller.<br />
Transmit Buffer TBF 10 bytes memory into which the CPU writes messages which are to be<br />
transmitted over the CAN network.<br />
Receive Buffers (0 and 1) RBF0 RBF0 and RBF1 are each 10 bytes memories which are alternatively used to<br />
RBF1 store messages received from the CAN network.<br />
The CPU can process one message while another is being received.<br />
Bit Stream Processor BSP Is a sequencer, controlling the data stream between the Transmit Buffer,<br />
Receive Buffers (parallel data) and the CAN-bus (serial data).<br />
Bit Timing Logic BTL Synchronizes the CAN-controller to the bitstream on the CAN-bus.<br />
Transceiver Control Logic TCL Controls the output driver.<br />
Error Management Logic EML Performs the error confinement according to the CAN-protocol.<br />
1996 Jun 27 29<br />
BIT TIMING<br />
LOGIC<br />
TRANSCEIVER<br />
LOGIC<br />
CAN<br />
CONTROLLER<br />
ERROR<br />
MANAGEMENT<br />
LOGIC<br />
BIT STREAM<br />
PROCESSOR<br />
2<br />
2<br />
MGA159<br />
CRX0<br />
and<br />
CRX1<br />
CTX0<br />
and<br />
CTX1