DAVID H. SHOEMAKER - LIGO - Caltech
DAVID H. SHOEMAKER - LIGO - Caltech
DAVID H. SHOEMAKER - LIGO - Caltech

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
o4 Systimes rialistes<br />
moteur<br />
verre<br />
0ande<br />
ts0ianle<br />
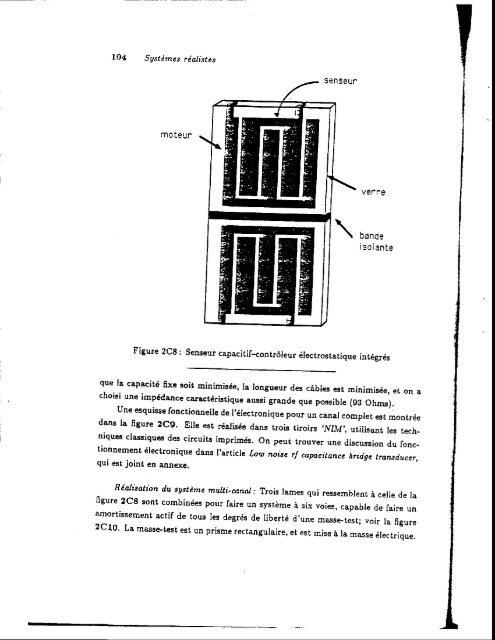
Figure 2C8 : Senseur<br />
capacitif-contr6leur<br />
dlectrostatique<br />
int6gr6s<br />
que la capaciti fixe soit minimisde, la longueur des cibles est minimisie, et<br />
choisi<br />
on a<br />
une imp6dance caractdristique aussi grande que possible (98 Ohnu).<br />
une esquisse fonctionnete de l'6rectronique pour un canar coopret est mont.6e<br />
dane Ia ffgure 2C9, Elle est rialisde dans trois tiroirs ,NlVf,, utilisant les techniques<br />
classiques des circuits imprimds. on peui irouver une discussion du<br />
tionnementfonc-<br />
6lectronique dans I'article Lou noise rl capacitance brid,ge tra,nsd,ucer,<br />
qui est joint en annexe.<br />
Rialisation du systime murti-canal: ?rois rames qui ressembrent i ce e de<br />
ligure<br />
Ia<br />
2C8 sont cornbindes pour faire un systEme A, six voies, capable de faire<br />
amortissement<br />
un<br />
actif de tous les degrds de libertd d,une masse-tesC; voir la figure<br />
2c10' La masse'test est un prisme rectangulaire, et est mise i la masse irectrique.