

24.2.2005 Nr. 9/479 EØS-tillegget til Den europeiske unions ... - EFTA
24.2.2005 Nr. 9/479 EØS-tillegget til Den europeiske unions ... - EFTA
24.2.2005 Nr. 9/479 EØS-tillegget til Den europeiske unions ... - EFTA

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Nr</strong>. 9/488 <strong>EØS</strong>-<strong><strong>til</strong>legget</strong> <strong>til</strong> <strong>Den</strong> <strong>europeiske</strong> <strong>unions</strong> tidende<br />
<strong>24.2.2005</strong><br />
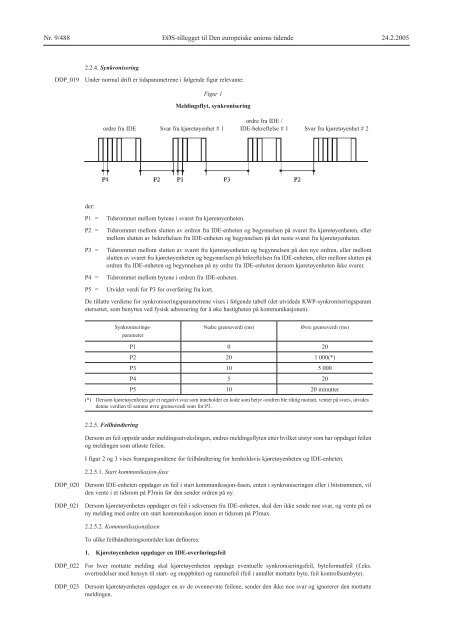
2.2.4. Synkronisering<br />
DDP_019 Under normal drift er tidsparametrene i følgende figur relevante:<br />
der:<br />
Figur 1<br />
Meldingsflyt, synkronisering<br />
ordre fra IDE Svar fra kjøretøyenhet # 1<br />
P1 = Tidsrommet mellom bytene i svaret fra kjøretøyenheten.<br />
ordre fra IDE /<br />
IDE-bekreftelse # 1 Svar fra kjøretøyenhet # 2<br />
P2 = Tidsrommet mellom slutten av ordren fra IDE-enheten og begynnelsen på svaret fra kjøretøyenheten, eller<br />
mellom slutten av bekreftelsen fra IDE-enheten og begynnelsen på det neste svaret fra kjøretøyenheten.<br />
P3 = Tidsrommet mellom slutten av svaret fra kjøretøyenheten og begynnelsen på den nye ordren, eller mellom<br />
slutten av svaret fra kjøretøyenheten og begynnelsen på bekreftelsen fra IDE-enheten, eller mellom slutten på<br />
ordren fra IDE-enheten og begynnelsen på ny ordre fra IDE-enheten dersom kjøretøyenheten ikke svarer.<br />
P4 = Tidsrommet mellom bytene i ordren fra IDE-enheten.<br />
P5 = Utvidet verdi for P3 for overføring fra kort.<br />
De <strong>til</strong>latte verdiene for synkroniseringsparametrene vises i følgende tabell (det utvidede KWP-synkroniseringsparam<br />
etersettet, som benyttes ved fysisk adressering for å øke hastigheten på kommunikasjonen).<br />
Synkroniseringsparameter<br />
Nedre grenseverdi (ms) Øvre grenseverdi (ms)<br />
P1 0 20<br />
P2 20 1 000(*)<br />
P3 10 5 000<br />
P4 5 20<br />
P5 10 20 minutter<br />
(*) Dersom kjøretøyenheten gir et negativt svar som inneholder en kode som betyr «ordren ble riktig mottatt, venter på svar», utvides<br />
denne verdien <strong>til</strong> samme øvre grenseverdi som for P3.<br />
2.2.5. Feilhåndtering<br />
Dersom en feil oppstår under meldingsutvekslingen, endres meldingsflyten etter hvilket utstyr som har oppdaget feilen<br />
og meldingen som utløste feilen.<br />
I figur 2 og 3 vises framgangsmåtene for feilhåndtering for henholdsvis kjøretøyenheten og IDE-enheten.<br />
2.2.5.1. Start kommunikasjon-fase<br />
DDP_020 Dersom IDE-enheten oppdager en feil i start kommunikasjon-fasen, enten i synkroniseringen eller i bitstrømmen, vil<br />
den vente i et tidsrom på P3min før den sender ordren på ny.<br />
DDP_021 Dersom kjøretøyenheten oppdager en feil i sekvensen fra IDE-enheten, skal den ikke sende noe svar, og vente på en<br />
ny melding med ordre om start kommunikasjon innen et tidsrom på P3max.<br />
2.2.5.2. Kommunikasjonsfasen<br />
To ulike feilhåndteringsområder kan defineres:<br />
1. Kjøretøyenheten oppdager en IDE-overføringsfeil<br />
DDP_022 For hver mottatte melding skal kjøretøyenheten oppdage eventuelle synkroniseringsfeil, byteformatfeil (f.eks.<br />
overtredelser med hensyn <strong>til</strong> start- og stoppbiter) og rammefeil (feil i antallet mottatte byte, feil kontrollsumbyte).<br />
DDP_023 Dersom kjøretøyenheten oppdager en av de ovennevnte feilene, sender den ikke noe svar og ignorerer den mottatte<br />
meldingen.













