Czerwiec 2006 - Polska Izba Inżynierów Budownictwa
Czerwiec 2006 - Polska Izba Inżynierów Budownictwa
Czerwiec 2006 - Polska Izba Inżynierów Budownictwa

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
TECHNOLOGIE<br />
• bikwadratowy (dwukwadratowy) –<br />
minimalna liczba punktów dostosowania<br />
m = 9. Stosuje się ją, gdy<br />
źródłowy rysunek uległ skurczowi<br />
„poduszkowatemu”, a także zwykłemu<br />
skurczowi i niedokładnemu<br />
skanowaniu;<br />
• bisześcienny (dwusześcienny) – minimalna<br />
liczba punktów dostosowania<br />
m = 16. Ten model pozwala<br />
korygować najbardziej złożone odkształcenia<br />
materiałów źródłowych<br />
i niedokładności skanowania.<br />
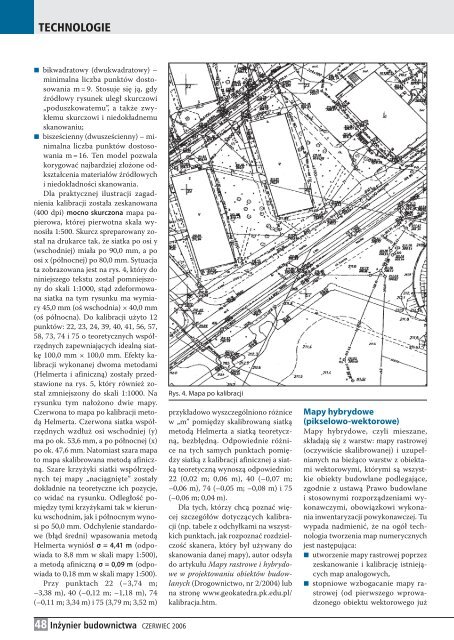
Dla praktycznej ilustracji zagadnienia<br />
kalibracji została zeskanowana<br />
(400 dpi) mocno skurczona mapa papierowa,<br />
której pierwotna skala wynosiła<br />
1:500. Skurcz spreparowany został<br />
na drukarce tak, że siatka po osi y<br />
(wschodniej) miała po 90,0 mm, a po<br />
osi x (północnej) po 80,0 mm. Sytuacja<br />
ta zobrazowana jest na rys. 4, który do<br />
niniejszego tekstu został pomniejszony<br />
do skali 1:1000, stąd zdeformowana<br />
siatka na tym rysunku ma wymiary<br />
45,0 mm (oś wschodnia) × 40,0 mm<br />
(oś północna). Do kalibracji użyto 12<br />
punktów: 22, 23, 24, 39, 40, 41, 56, 57,<br />
58, 73, 74 i 75 o teoretycznych współrzędnych<br />
zapewniających idealną siatkę<br />
100,0 mm × 100,0 mm. Efekty kalibracji<br />
wykonanej dwoma metodami<br />
(Helmerta i afiniczną) zostały przedstawione<br />
na rys. 5, który również został<br />
zmniejszony do skali 1:1000. Na<br />
rysunku tym nałożono dwie mapy.<br />
Czerwona to mapa po kalibracji metodą<br />
Helmerta. Czerwona siatka współrzędnych<br />
wzdłuż osi wschodniej (y)<br />
ma po ok. 53,6 mm, a po północnej (x)<br />
po ok. 47,6 mm. Natomiast szara mapa<br />
to mapa skalibrowana metodą afiniczną.<br />
Szare krzyżyki siatki współrzędnych<br />
tej mapy „naciągnięte” zostały<br />
dokładnie na teoretyczne ich pozycje,<br />
co widać na rysunku. Odległość pomiędzy<br />
tymi krzyżykami tak w kierunku<br />
wschodnim, jak i północnym wynosi<br />
po 50,0 mm. Odchylenie standardowe<br />
(błąd średni) wpasowania metodą<br />
Helmerta wyniósł σ = 4,41 m (odpowiada<br />
to 8,8 mm w skali mapy 1:500),<br />
a metodą afiniczną σ = 0,09 m (odpowiada<br />
to 0,18 mm w skali mapy 1:500).<br />
Przy punktach 22 (–3,74 m;<br />
–3,38 m), 40 (–0,12 m; –1,18 m), 74<br />
(–0,11 m; 3,34 m) i 75 (3,79 m; 3,52 m)<br />
Rys. 4. Mapa po kalibracji<br />
przykładowo wyszczególniono różnice<br />
w „m” pomiędzy skalibrowaną siatką<br />
metodą Helmerta a siatką teoretyczną,<br />
bezbłędną. Odpowiednie różnice<br />
na tych samych punktach pomiędzy<br />
siatką z kalibracji afinicznej a siatką<br />
teoretyczną wynoszą odpowiednio:<br />
22 (0,02 m; 0,06 m), 40 (–0,07 m;<br />
–0,06 m), 74 (–0,05 m; –0,08 m) i 75<br />
(–0,06 m; 0,04 m).<br />
Dla tych, którzy chcą poznać więcej<br />
szczegółów dotyczących kalibracji<br />
(np. tabele z odchyłkami na wszystkich<br />
punktach, jak rozpoznać rozdzielczość<br />
skanera, który był używany do<br />
skanowania danej mapy), autor odsyła<br />
do artykułu Mapy rastrowe i hybrydowe<br />
w projektowaniu obiektów budowlanych<br />
(Drogownictwo, nr 2/2004) lub<br />
na stronę www.geokatedra.pk.edu.pl/<br />
kalibracja.htm.<br />
Mapy hybrydowe<br />
(pikselowo-wektorowe)<br />
Mapy hybrydowe, czyli mieszane,<br />
składają się z warstw: mapy rastrowej<br />
(oczywiście skalibrowanej) i uzupełnianych<br />
na bieżąco warstw z obiektami<br />
wektorowymi, którymi są wszystkie<br />
obiekty budowlane podlegające,<br />
zgodnie z ustawą Prawo budowlane<br />
i stosownymi rozporządzeniami wykonawczymi,<br />
obowiązkowi wykonania<br />
inwentaryzacji powykonawczej. Tu<br />
wypada nadmienić, że na ogół technologia<br />
tworzenia map numerycznych<br />
jest następująca:<br />
• utworzenie mapy rastrowej poprzez<br />
zeskanowanie i kalibrację istniejących<br />
map analogowych,<br />
• stopniowe wzbogacanie mapy rastrowej<br />
(od pierwszego wprowadzonego<br />
obiektu wektorowego już<br />
48 Inżynier budownictwa CZERWIEC <strong>2006</strong>