
Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
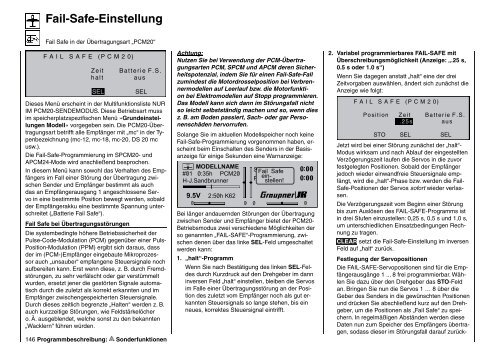
Fail-Safe-Einstellung<br />
Fail Safe in der Übertragungsart „PCM20“<br />
FAIL SAFE (PCM20)<br />
Zeit Batterie F.S.<br />
halt aus<br />
SEL SEL<br />
Dieses Menü erscheint in der Multifunktionsliste NUR<br />
IM PCM20-SENDEMODUS. Diese Betriebsart muss<br />
im speicherplatzspezifi schen Menü »Grundeinstellungen<br />
Modell« vorgegeben sein. Die PCM20-Übertragungsart<br />
betrifft alle Empfänger mit „mc“ in der Typenbezeichnung<br />
(mc-12, mc-18, mc-20, DS 20 mc<br />
usw.).<br />
Die Fail-Safe-Programmierung im SPCM20- und<br />
APCM24-Mode wird anschließend besprochen.<br />
In diesem Menü kann sowohl das Verhalten des Empfängers<br />
im Fall einer Störung der Übertragung zwischen<br />
Sender und Empfänger bestimmt als auch<br />
das an Empfängerausgang 1 angeschlossene Servo<br />
in eine bestimmte Position bewegt werden, sobald<br />
der Empfängerakku eine bestimmte Spannung unterschreitet<br />
(„Batterie Fail Safe“).<br />
Fail Safe bei Übertragungsstörungen<br />
Die systembedingte höhere Betriebssicherheit der<br />
Pulse-Code-Modulation (PCM) gegenüber einer Puls-<br />
Position-Modulation (PPM) ergibt sich daraus, dass<br />
der im (PCM-)Empfänger eingebaute Mikroprozessor<br />
auch „unsauber“ empfangene Steuersignale noch<br />
aufbereiten kann. Erst wenn diese, z. B. durch Fremdstörungen,<br />
zu sehr verfälscht oder gar verstümmelt<br />
wurden, ersetzt jener die gestörten Signale automatisch<br />
durch die zuletzt als korrekt erkannten und im<br />
Empfänger zwischengespeicherten Steuersignale.<br />
Durch dieses zeitlich begrenzte „Halten“ werden z. B.<br />
auch kurzzeitige Störungen, wie Feldstärkelöcher<br />
o. Ä. ausgeblendet, welche sonst zu den bekannten<br />
„Wacklern“ führen würden.<br />
146 Programmbeschreibung: Sonderfunktionen<br />
Achtung:<br />
Nutzen Sie bei Verwendung der PCM-Übertragungsarten<br />
PCM, SPCM und APCM deren Sicherheitspotenzial,<br />
indem Sie für einen Fail-Safe-Fall<br />
zumindest die Motordrosselposition bei Verbrennermodellen<br />
auf Leerlauf bzw. die Motorfunktion<br />
bei Elektromodellen auf Stopp programmieren.<br />
Das Modell kann sich dann im Störungsfall nicht<br />
so leicht selbstständig machen und so, wenn dies<br />
z. B. am Boden passiert, Sach- oder gar Personenschäden<br />
hervorrufen.<br />
Solange Sie im aktuellen Modellspeicher noch keine<br />
Fail-Safe-Programmierung vorgenommen haben, erscheint<br />
beim Einschalten des Senders in der Basisanzeige<br />
für einige Sekunden eine Warnanzeige:<br />
MODELLNAME<br />
#01 0:35h PCM20<br />
H-J.Sandbrunner<br />
Stoppuhr Fail Safe<br />
Flugzeit<br />
einstellen!<br />
000 :<br />
000 :<br />
9.5V 2:50h K62<br />
0 0 0 0<br />
Bei länger andauernden Störungen der Übertragung<br />
zwischen Sender und Empfänger bietet der PCM20-<br />
Betriebsmodus zwei verschiedene Möglichkeiten der<br />
so genannten „FAIL-SAFE“-Programmierung, zwischen<br />
denen über das linke SEL-Feld umgeschaltet<br />
werden kann:<br />
1. „halt“-Programm<br />
Wenn Sie nach Bestätigung des linken SEL-Feldes<br />
durch Kurzdruck auf den Drehgeber im dann<br />
inversen Feld „halt“ einstellen, bleiben die Servos<br />
im Falle einer Übertragungsstörung an der Position<br />
des zuletzt vom Empfänger noch als gut erkannten<br />
Steuersignals so lange stehen, bis ein<br />
neues, korrektes Steuersignal eintrifft.<br />
2. Variabel programmierbares FAIL-SAFE mit<br />
Überschreibungsmöglichkeit (Anzeige: „.25 s,<br />
0.5 s oder 1.0 s“)<br />
Wenn Sie dagegen anstatt „halt“ eine der drei<br />
Zeitvorgaben auswählen, ändert sich zunächst die<br />
Anzeige wie folgt:<br />
FAIL SAFE (PCM20)<br />
Position Zeit Batterie F.S.<br />
.25s aus<br />
STO<br />
SEL SEL<br />
Jetzt wird bei einer Störung zunächst der „halt“-<br />
Modus wirksam und nach Ablauf der eingestellten<br />
Verzögerungszeit laufen die Servos in die zuvor<br />
festgelegten Positionen. Sobald der Empfänger<br />
jedoch wieder einwandfreie Steuersignale empfängt,<br />
wird die „halt“-Phase bzw. werden die Fail-<br />
Safe-Positionen der Servos sofort wieder verlassen.<br />
Die Verzögerungszeit vom Beginn einer Störung<br />
bis zum Auslösen des FAIL-SAFE-Programms ist<br />
in drei Stufen einzustellen: 0,25 s, 0,5 s und 1,0 s,<br />
um unterschiedlichen Einsatzbedingungen Rechnung<br />
zu tragen.<br />
CLEAR setzt die Fail-Safe-Einstellung im inversen<br />
Feld auf „halt“ zurück.<br />
Festlegung der Servopositionen<br />
Die FAIL-SAFE-Servopositionen sind für die Empfängerausgänge<br />
1 ... 8 frei programmierbar. Wählen<br />
Sie dazu über den Drehgeber das STO-Feld<br />
an. Bringen Sie nun die Servos 1 … 8 über die<br />
Geber des Senders in die gewünschten Positionen<br />
und drücken Sie abschließend kurz auf den Drehgeber,<br />
um die Positionen als „Fail Safe“ zu speichern.<br />
In regelmäßigen Abständen werden diese<br />
Daten nun zum Speicher des Empfängers übertragen,<br />
sodass dieser im Störungsfall darauf zurück-