
Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
»Dual Rate/Exponential« (Seite 86)<br />
Querruder 100% + 25%<br />
Höhenruder 80% +30%<br />
Seitenruder 100% 0%<br />
DUAL EXP0<br />
▼ ▲<br />
SEL<br />
SEL<br />
… den eigenen Erfordernissen und Gewohnheiten<br />
entsprechend anpassen.<br />
Mit „Dual Rate“ wird die Wirksamkeit des Steuerknüppels<br />
in seiner Stärke eingestellt. Sind dagegen<br />
die Maximalausschläge in Ordnung, lediglich die Reaktionen<br />
um die Mittelstellung für feinfühligeres Steuern<br />
zu giftig, dann tritt (zusätzlich) die „Exponential“-<br />
Funktion in Aktion. Wird auch ein Schalter zugewiesen,<br />
kann während des Fluges sogar zwischen zwei<br />
unterschiedlichen Dual-Rate-/Expo-Einstellungen umgeschaltet<br />
werden.<br />
Ähnliches gilt für die Funktion …<br />
»Kanal 1 Kurve« (Seite 90)<br />
Kanal 1<br />
KURVE<br />
Eingang +73%<br />
Kurve Ausgang –25%<br />
ein Punkt 1 –25%<br />
164 Programmierbeispiele: Flächenmodelle<br />
� OUTPUT<br />
-- +<br />
In dieser Option kann durch Setzen einer oder auch<br />
mehrerer Punkte die Steuerkurve des Gas-/Bremsknüppels<br />
so beeinfl usst werden, dass ein angenehmes<br />
oder auch nur zweckentsprechendes Verhalten<br />
gewährleistet ist.<br />
Als Beispiel sei dazu der „tote“ Weg von Störklappen<br />
genannt. Die Klappen kommen dadurch erst nach einem<br />
gewissen „Leerweg“ des Bremsknüppels aus der<br />
Tragfl äche. Durch entsprechendes „Verbiegen“ der<br />
Kurve wird erreicht, dass der „tote“ Weg schneller zu-<br />
1<br />
100<br />
rückgelegt wird. Die Störklappen kommen so früher<br />
aus der Tragfl äche heraus, der restliche Weg ist dann<br />
aber feinfühliger steuerbar. (Sinngemäß gilt dies natürlich<br />
genauso gut auch für die Steuerung eines Motors,<br />
der alternativ über K1 angesteuert wird.)<br />
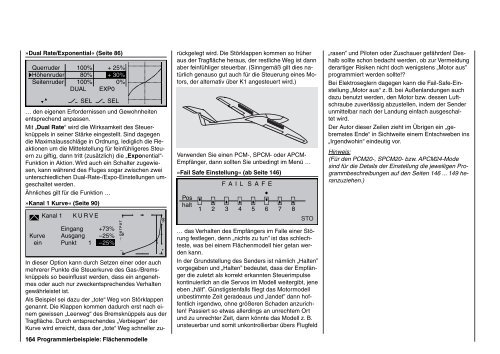
Verwenden Sie einen PCM-, SPCM- oder APCM-<br />
Empfänger, dann sollten Sie unbedingt im Menü …<br />
»Fail Safe Einstellung« (ab Seite 146)<br />
FAIL SAFE<br />
Pos<br />
halt 1 2 3 4 5 6 7 8<br />
STO<br />
… das Verhalten des Empfängers im Falle einer Störung<br />
festlegen, denn „nichts zu tun” ist das schlechteste,<br />
was bei einem Flächenmodell hier getan werden<br />
kann.<br />
In der Grundstellung des Senders ist nämlich „Halten”<br />
vorgegeben und „Halten” bedeutet, dass der Empfänger<br />
die zuletzt als korrekt erkannten Steuerimpulse<br />
kontinuierlich an die Servos im Modell weitergibt, jene<br />
eben „hält”. Günstigstenfalls fl iegt das Motormodell<br />
unbestimmte Zeit geradeaus und „landet” dann hoffentlich<br />
irgendwo, ohne größeren Schaden anzurichten!<br />
Passiert so etwas allerdings an unrechtem Ort<br />
und zu unrechter Zeit, dann könnte das Modell z. B.<br />
unsteuerbar und somit unkontrollierbar übers Flugfeld<br />
„rasen” und Piloten oder Zuschauer gefährden! Deshalb<br />
sollte schon bedacht werden, ob zur Vermeidung<br />
derartiger Risiken nicht doch wenigstens „Motor aus”<br />
programmiert werden sollte!?<br />
Bei Elektroseglern dagegen kann die Fail-Safe-Einstellung<br />
„Motor aus“ z. B. bei Außenlandungen auch<br />
dazu benutzt werden, den Motor bzw. dessen Luftschraube<br />
zuverlässig abzustellen, indem der Sender<br />
unmittelbar nach der Landung einfach ausgeschaltet<br />
wird.<br />
Der Autor dieser Zeilen zieht im Übrigen ein „gebremstes<br />
Ende“ in Sichtweite einem Entschweben ins<br />
„Irgendwohin“ eindeutig vor.<br />
Hinweis:<br />
(Für den PCM20-, SPCM20- bzw. APCM24-Mode<br />
sind für die Details der Einstellung die jeweiligen Programmbeschreibungen<br />
auf den Seiten 146 ... 149 heranzuziehen.)