
Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
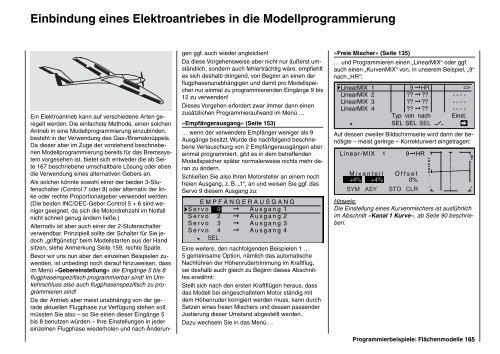
Einbindung eines Elektroantriebes in die Modellprogrammierung<br />
Ein Elektroantrieb kann auf verschiedene Arten geregelt<br />
werden. Die einfachste Methode, einen solchen<br />
Antrieb in eine Modellprogrammierung einzubinden,<br />
besteht in der Verwendung des Gas-/Bremsknüppels.<br />
Da dieser aber im Zuge der vorstehend beschriebenen<br />
Modellprogrammierung bereits für das Bremssystem<br />
vorgesehen ist, bietet sich entweder die ab Seite<br />
167 beschriebene umschaltbare Lösung oder eben<br />
die Verwendung eines alternativen Gebers an.<br />
Als solcher könnte sowohl einer der beiden 3-Stufenschalter<br />
(Control 7 oder 8) oder alternativ der linke<br />
oder rechte Proportionalgeber verwendet werden.<br />
(Die beiden INC/DEC-Geber Control 5 + 6 sind weniger<br />
geeignet, da sich die Motordrehzahl im Notfall<br />
nicht schnell genug ändern ließe.)<br />
Alternativ ist aber auch einer der 2-Stufenschalter<br />
verwendbar. Prinzipiell sollte der Schalter für Sie jedoch<br />
„griffgünstig“ beim Modellstarten aus der Hand<br />
sitzen, siehe Anmerkung Seite 159, rechte Spalte.<br />
Bevor wir uns nun aber den einzelnen Beispielen zuwenden,<br />
ist unbedingt noch darauf hinzuweisen, dass<br />
im Menü »Gebereinstellung« die Eingänge 5 bis 8<br />
fl ugphasenspezifi sch programmierbar sind! Im Umkehrschluss<br />
also auch fl ugphasenspezifi sch zu programmieren<br />
sind!<br />
Da der Antrieb aber meist unabhängig von der gerade<br />
aktuellen Flugphase zur Verfügung stehen soll,<br />
müssten Sie also – so Sie einen dieser Eingänge 5<br />
bis 8 benutzen würden – Ihre Einstellungen in jeder<br />
einzelnen Flugphase wiederholen und nach Änderun-<br />
gen ggf. auch wieder angleichen!<br />
Da diese Vorgehensweise aber nicht nur äußerst umständlich,<br />
sondern auch fehlerträchtig wäre, empfi ehlt<br />
es sich deshalb dringend, von Beginn an einen der<br />
fl ugphasenunabhängigen und damit pro Modellspeicher<br />
nur einmal zu programmierenden Eingänge 9 bis<br />
12 zu verwenden!<br />
Dieses Vorgehen erfordert zwar immer dann einen<br />
zusätzlichen Programmieraufwand im Menü …<br />
»Empfängerausgang« (Seite 153)<br />
… wenn der verwendete Empfänger weniger als 9<br />
Ausgänge besitzt. Wurde die nachfolgend beschriebene<br />
Vertauschung von 2 Empfängerausgängen aber<br />
einmal programmiert, gibt es in dem betreffenden<br />
Modellspeicher später normalerweise nichts mehr daran<br />
zu ändern.<br />
Schließen Sie also Ihren Motorsteller an einem noch<br />
freien Ausgang, z. B. „1“, an und weisen Sie ggf. das<br />
Servo 9 diesem Ausgang zu:<br />
E M P F Ä N G E R A U S G A N G<br />
Servo 9 Ausgang 1<br />
Servo 2 Ausgang 2<br />
Servo 3 Ausgang 3<br />
Servo 4 Ausgang 4<br />
▼ SEL<br />
Eine weitere, den nachfolgenden Beispielen 1 …<br />
5 gemeinsame Option, nämlich das automatische<br />
Nachführen der Höhenrudertrimmung im Kraftfl ug,<br />
sei deshalb auch gleich zu Beginn dieses Abschnittes<br />
erwähnt:<br />
Stellt sich nach den ersten Kraftfl ügen heraus, dass<br />
das Modell bei eingeschaltetem Motor ständig mit<br />
dem Höhenruder korrigiert werden muss, kann durch<br />
Setzen eines freien Mischers und dessen passender<br />
Justierung dieser Umstand abgestellt werden.<br />
Dazu wechseln Sie in das Menü …<br />
»Freie Mischer« (Seite 135)<br />
… und Programmieren einen „LinearMIX“ oder ggf.<br />
auch einen „KurvenMIX“ von, in unserem Beispiel, „9“<br />
nach „HR”:<br />
LinearMIX 1 =><br />
LinearMIX 2<br />
LinearMIX 3 ?? ?? ----<br />
LinearMIX 4 ?? ?? ----<br />
Typ von nach Einst.<br />
▼ SEL<br />
▲<br />
9 HR<br />
?? ?? ----<br />
SEL SEL<br />
Auf dessen zweiter Bildschirmseite wird dann der benötigte<br />
– meist geringe – Korrekturwert eingetragen:<br />
Linear-MIX 1 9 HR<br />
Mixanteil Offset<br />
+4% +4% 0%<br />
SYM ASY STO CLR<br />
Programmierbeispiele: Flächenmodelle<br />
165<br />
� OUTPUT<br />
100<br />
-- +<br />
Hinweis:<br />
Die Einstellung eines Kurvenmischers ist ausführlich<br />
im Abschnitt »Kanal 1 Kurve«, ab Seite 90 beschrieben.