Steering Behaviors
Steering Behaviors
Steering Behaviors

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Steering</strong> <strong>Behaviors</strong><br />
Autoren: Thomas Feilkas, Christian Schnellhammer<br />
Betreuer: Prof. Jürgen Sauer Regensburg<br />
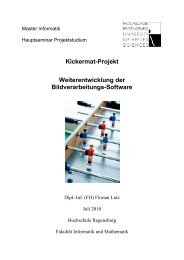
Gewünschte<br />
Geschwindigkeit<br />
Aktuelle<br />
Geschwindigkeit<br />
Resultierender<br />
Steurerungsvektor<br />
(Seek Verhalten)<br />
Ziel<br />
Abbildung 3: Kraftvektor beim Seek Verhalten<br />
Beim Seek Verhalten subtrahiert man die aktuelle Geschwindigkeit des<br />
Fahrzeuges von der gewünschten Geschwindigkeit. Um den Kraftvektor des<br />
Flee Verhaltens auszurechnen, wird statt dessen der gewünschte<br />
Geschwindigkeitsvektor von der aktuellen Geschwindigkeit abgezogen. Durch<br />
diese einfache Berechnung kann das Fahrzeug entweder in Richtung des Ziels<br />
gesteuert werden, oder vom Ziel weg gesteuert werden. Zu beachten ist wie bei<br />
allen Verhalten, das der resultierende Kraftvektor die maximale Kraft des<br />
Fahrzeuges nicht überschreiten darf.<br />
Problematik<br />
Da das Seek Verhalten kontinuierlich seinen Kraftvektor erzeugt, kann sich ein<br />
in den meisten Fällen unerwünschter Effekt ergeben. Falls das Ziel statisch ist,<br />
oder sich langsamer als das Fahrzeug bewegt, führt die zum Ziel gerichtete<br />
Steuerungskraft zwar zuerst zu einem Erreichen des Ziels, steuert aber dann<br />
noch weiter über das Ziel hinaus. Nun wird wiederum ein Kraftvektor in die<br />
entgegengesetzte Richtung erzeugt und das Fahrzeug steuert wieder zurück.<br />
Die entstehende Bewegung ähnelt einer Motte, die um eine Lichtquelle fliegt.<br />
9