

Mechanik 1 - TU Wien
Mechanik 1 - TU Wien
Mechanik 1 - TU Wien

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3 Spannungen <strong>Mechanik</strong> 1<br />
z<br />
⃗n<br />
⃗t<br />
x<br />
y<br />
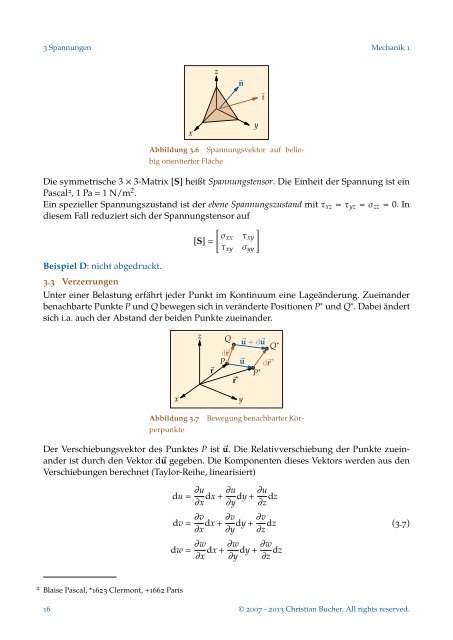
Abbildung 3.6<br />
Spannungsvektor auf beliebig<br />
orientierter Fläche<br />
Die symmetrische 3 × 3-Matrix [S] heißt Spannungstensor. Die Einheit der Spannung ist ein<br />
Pascal 2 , 1 Pa = 1 N/m 2 .<br />
Ein spezieller Spannungszustand ist der ebene Spannungszustand mit τ xz = τ yz = σ zz = 0. In<br />
diesem Fall reduziert sich der Spannungstensor auf<br />
[ ]<br />
σxx τ<br />
[S] = xy<br />
τ xy σ yy<br />
Beispiel D: nicht abgedruckt.<br />
3.3 Verzerrungen<br />
Unter einer Belastung erfährt jeder Punkt im Kontinuum eine Lageänderung. Zueinander<br />
benachbarte Punkte P und Q bewegen sich in veränderte Positionen P ∗ und Q ∗ . Dabei ändert<br />
sich i.a. auch der Abstand der beiden Punkte zueinander.<br />
z<br />
⃗r<br />
Q<br />
d⃗r<br />
P<br />
⃗r ∗<br />
⃗u + d⃗u<br />
⃗u<br />
P ∗<br />
d⃗r ∗<br />
Q ∗<br />
x<br />
Abbildung 3.7<br />
Bewegung benachbarter Körperpunkte<br />
y<br />
Der Verschiebungsvektor des Punktes P ist ⃗u. Die Relativverschiebung der Punkte zueinander<br />
ist durch den Vektor d⃗u gegeben. Die Komponenten dieses Vektors werden aus den<br />
Verschiebungen berechnet (Taylor-Reihe, linearisiert)<br />
du = ∂u ∂u ∂u<br />
dx + dy +<br />
∂x ∂y ∂z dz<br />
dv = ∂v<br />
∂x<br />
dw = ∂w<br />
∂x<br />
dx +<br />
∂v<br />
∂y<br />
∂v<br />
dy + dz (3.7)<br />
∂z<br />
∂w ∂w<br />
dx + dy +<br />
∂y ∂z dz<br />
2 Blaise Pascal, *1623 Clermont, +1662 Paris<br />
16 © 2007 - 2013 Christian Bucher. All rights reserved.













