

Mechanik 1 - TU Wien
Mechanik 1 - TU Wien
Mechanik 1 - TU Wien

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Mechanik</strong> 1<br />
5 Kinematik des Punktes und des starren Körpers<br />
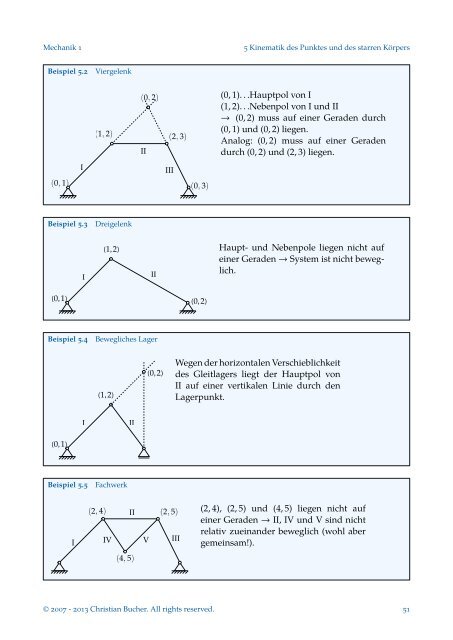
Beispiel 5.2<br />
Viergelenk<br />
I<br />
(1, 2) (2, 3)<br />
II<br />
III<br />
(0, 1) (0, 3)<br />
(0, 2) (0, 1). . .Hauptpol von I<br />
(1, 2). . .Nebenpol von I und II<br />
→ (0, 2) muss auf einer Geraden durch<br />
(0, 1) und (0, 2) liegen.<br />
Analog: (0, 2) muss auf einer Geraden<br />
durch (0, 2) und (2, 3) liegen.<br />
Beispiel 5.3<br />
Dreigelenk<br />
I<br />
(1,2) Haupt- und Nebenpole liegen nicht auf<br />
einer Geraden → System ist nicht beweglich.<br />
II<br />
(0,1) (0,2)<br />
Beispiel 5.4<br />
Bewegliches Lager<br />
(1,2)<br />
(0,2)<br />
Wegen der horizontalen Verschieblichkeit<br />
des Gleitlagers liegt der Hauptpol von<br />
II auf einer vertikalen Linie durch den<br />
Lagerpunkt.<br />
I<br />
II<br />
(0,1)<br />
Beispiel 5.5<br />
Fachwerk<br />
I<br />
(2, 4)<br />
IV<br />
II<br />
V<br />
(2, 5)<br />
III<br />
(2, 4), (2, 5) und (4, 5) liegen nicht auf<br />
einer Geraden → II, IV und V sind nicht<br />
relativ zueinander beweglich (wohl aber<br />
gemeinsam!).<br />
(4, 5)<br />
© 2007 - 2013 Christian Bucher. All rights reserved. 51













