

KR C2 edition2005 - KUKA Robotics
KR C2 edition2005 - KUKA Robotics
KR C2 edition2005 - KUKA Robotics

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>KR</strong> <strong>C2</strong> <strong>edition2005</strong><br />
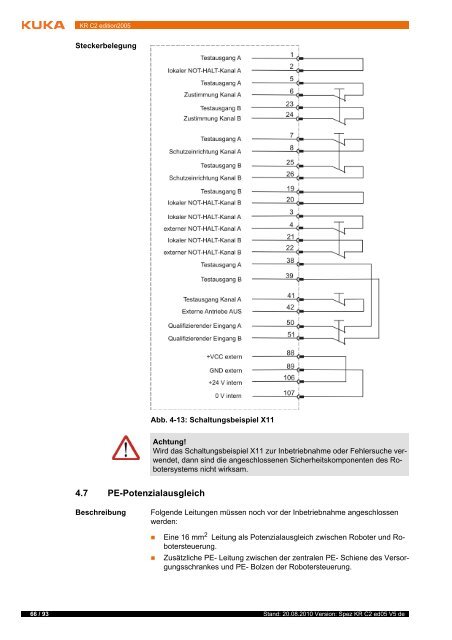
Steckerbelegung<br />
Abb. 4-13: Schaltungsbeispiel X11<br />
Achtung!<br />
Wird das Schaltungsbeispiel X11 zur Inbetriebnahme oder Fehlersuche verwendet,<br />
dann sind die angeschlossenen Sicherheitskomponenten des Robotersystems<br />
nicht wirksam.<br />
4.7 PE-Potenzialausgleich<br />
Beschreibung<br />
Folgende Leitungen müssen noch vor der Inbetriebnahme angeschlossen<br />
werden:<br />
• Eine 16 mm 2 Leitung als Potenzialausgleich zwischen Roboter und Robotersteuerung.<br />
• Zusätzliche PE- Leitung zwischen der zentralen PE- Schiene des Versorgungsschrankes<br />
und PE- Bolzen der Robotersteuerung.<br />
66 / 93 Stand: 20.08.2010 Version: Spez <strong>KR</strong> <strong>C2</strong> ed05 V5 de














