Skript aus der Mikrosystemtechnik
Skript aus der Mikrosystemtechnik
Skript aus der Mikrosystemtechnik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
2. Systembeschreibung im Zeitbereich Seite 18<br />
Vorlesung Systemtheorie<br />
Dr.-Ing. Ch. Ament<br />
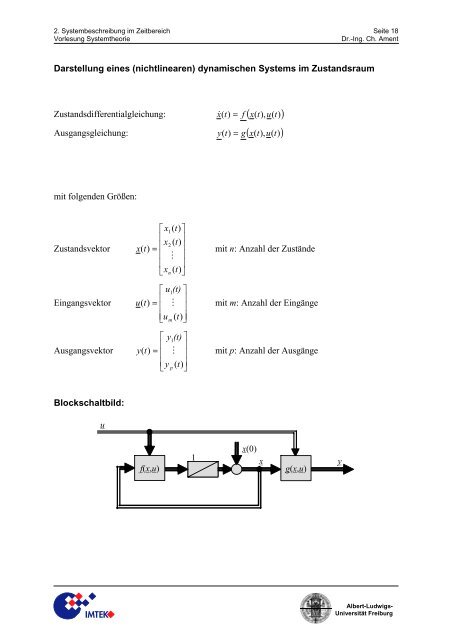
Darstellung eines (nichtlinearen) dynamischen Systems im Zustandsraum<br />
Zustandsdifferentialgleichung: x &( t)<br />
= f ( x(<br />
t),<br />
u(<br />
t)<br />
)<br />
Ausgangsgleichung: y ( t)<br />
= g( x(<br />
t),<br />
u(<br />
t)<br />
)<br />
mit folgenden Größen:<br />
Zustandsvektor<br />
Eingangsvektor<br />
⎡ x1<br />
( t)<br />
⎤<br />
⎢ ⎥<br />
⎢<br />
x2<br />
( t)<br />
x(<br />
t)<br />
= ⎥<br />
⎢ M ⎥<br />
⎢ ⎥<br />
⎣xn<br />
( t)<br />
⎦<br />
mit n: Anzahl <strong>der</strong> Zustände<br />
⎡ u1(t)<br />
⎤<br />
u(<br />
t)<br />
=<br />
⎢ ⎥<br />
⎢<br />
M<br />
⎥<br />
mit m: Anzahl <strong>der</strong> Eingänge<br />
⎢⎣<br />
u ( t)<br />
⎥<br />
m ⎦<br />
Ausgangsvektor<br />
⎡ y1(t)<br />
⎤<br />
⎢ ⎥<br />
y(<br />
t)<br />
= ⎢ M ⎥<br />
⎢ ⎥<br />
⎣y<br />
p<br />
( t)<br />
⎦<br />
mit p: Anzahl <strong>der</strong> Ausgänge<br />
Blockschaltbild:<br />
u<br />
f(x,u)<br />
x(0)<br />
1 x<br />
y<br />
g(x,u)<br />
Albert-Ludwigs-<br />
Universität Freiburg