Skript aus der Mikrosystemtechnik
Skript aus der Mikrosystemtechnik
Skript aus der Mikrosystemtechnik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5. Regelung Seite 41<br />
Vorlesung Systemtheorie<br />
Prof. Dr.-Ing. Ch. Ament<br />
Darstellung des geschlossenen Regelkreises mit linearer<br />
Zustandsrückführung:<br />
Zustandsdifferentialgleichung <strong>der</strong> Strecke: x &( t)<br />
= A x(<br />
t)<br />
+ B u(<br />
t)<br />
Ausgangsgleichung <strong>der</strong> Strecke: y ( t)<br />
= C x(<br />
t)<br />
+ D u(<br />
t)<br />
lineare Zustandsrückführung und Vorfilter: u ( t)<br />
= −K<br />
x(<br />
t)<br />
+ S w(<br />
t)<br />
Durch Einsetzen für u(t)<br />
erhält man die Gleichungen des geregelten Systems:<br />
Zustandsdifferentialgleichung des geregelten Systems: x &( t)<br />
= ( A − BK)<br />
x(<br />
t)<br />
+ BS w(<br />
t)<br />
Ausgangsgleichung des geregelten Systems: y ( t)<br />
= ( C − DK)<br />
x(<br />
t)<br />
+ DS w(<br />
t)<br />
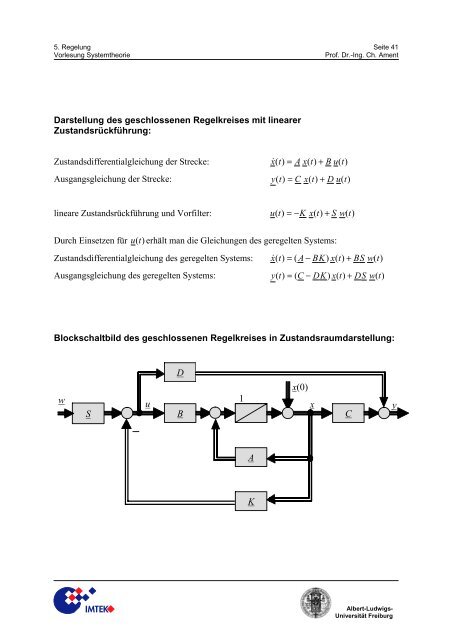
Blockschaltbild des geschlossenen Regelkreises in Zustandsraumdarstellung:<br />
D<br />
w<br />
S<br />
u<br />
B<br />
1<br />
x(0)<br />
x<br />
C<br />
y<br />
A<br />
K<br />
Albert-Ludwigs-<br />
Universität Freiburg