Skript aus der Mikrosystemtechnik
Skript aus der Mikrosystemtechnik
Skript aus der Mikrosystemtechnik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5. Regelung Seite 39<br />
Vorlesung Systemtheorie<br />
Prof. Dr.-Ing. Ch. Ament<br />
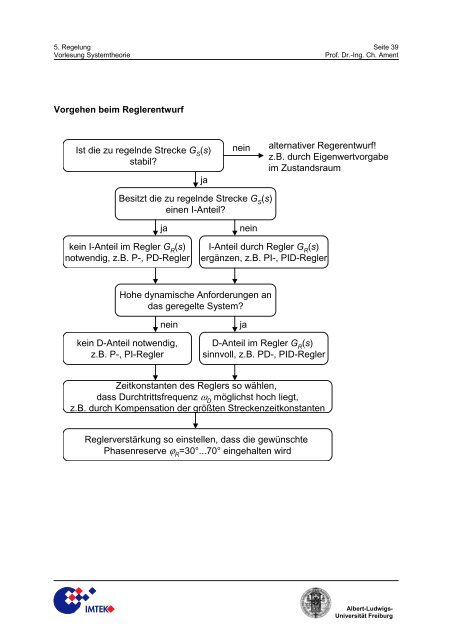
Vorgehen beim Reglerentwurf<br />
Ist die zu regelnde Strecke G S<br />
(s)<br />
stabil<br />
ja<br />
nein<br />
alternativer Regerentwurf!<br />
z.B. durch Eigenwertvorgabe<br />
im Zustandsraum<br />
Besitzt die zu regelnde Strecke G S<br />
(s)<br />
einen I-Anteil<br />
ja<br />
kein I-Anteil im Regler G R<br />
(s)<br />
notwendig, z.B. P-, PD-Regler<br />
nein<br />
I-Anteil durch Regler G R<br />
(s)<br />
ergänzen, z.B. PI-, PID-Regler<br />
Hohe dynamische Anfor<strong>der</strong>ungen an<br />
das geregelte System<br />
nein<br />
kein D-Anteil notwendig,<br />
z.B. P-, PI-Regler<br />
ja<br />
D-Anteil im Regler G R<br />
(s)<br />
sinnvoll, z.B. PD-, PID-Regler<br />
Zeitkonstanten des Reglers so wählen,<br />
dass Durchtrittsfrequenz ω D<br />
möglichst hoch liegt,<br />
z.B. durch Kompensation <strong>der</strong> größten Streckenzeitkonstanten<br />
Reglerverstärkung so einstellen, dass die gewünschte<br />
Phasenreserve ϕ R<br />
=30°...70° eingehalten wird<br />
Albert-Ludwigs-<br />
Universität Freiburg