MATLAB und Simulink in der Ingenieurpraxis
MATLAB und Simulink in der Ingenieurpraxis
MATLAB und Simulink in der Ingenieurpraxis

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
0 15<br />
3<br />
10<br />
4<br />
5<br />
8<br />
9<br />
1<br />
1<br />
x (5)<br />
n<br />
x (4)<br />
n<br />
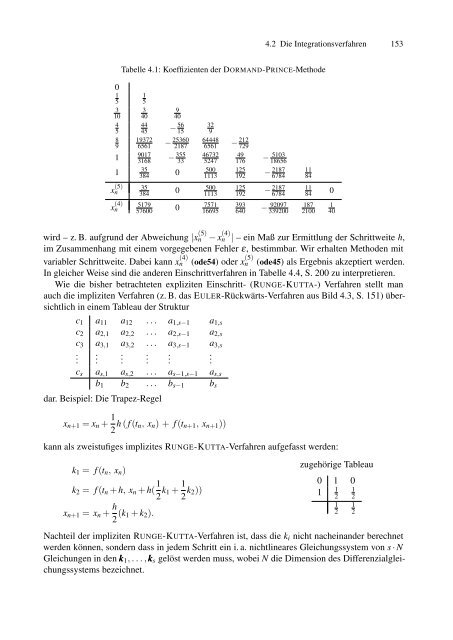
Tabelle 4.1: Koeffizienten <strong>der</strong> DORMAND-PRINCE-Methode<br />
1<br />
5<br />
3<br />
40<br />
9<br />
40<br />
44<br />
45 − 56<br />
15<br />
32<br />
9<br />
19372<br />
6561 − 25360<br />
2187<br />
64448<br />
6561<br />
9017<br />
3168 − 355<br />
33<br />
46732<br />
5247<br />
35<br />
384 0 500<br />
1113<br />
35<br />
500<br />
384 0 1113<br />
5179<br />
7571<br />
57600 0 16695<br />
− 212<br />
729<br />
49<br />
176<br />
125<br />
192<br />
125<br />
192<br />
393<br />
640<br />
4.2 Die Integrationsverfahren 153<br />
− 5103<br />
18656<br />
− 2187<br />
6784<br />
− 2187<br />
6784<br />
− 92097<br />
339200<br />
wird – z. B. aufgr<strong>und</strong> <strong>der</strong> Abweichung |x (5)<br />
n − x (4)<br />
n | – e<strong>in</strong> Maß zur Ermittlung <strong>der</strong> Schrittweite h,<br />
im Zusammenhang mit e<strong>in</strong>em vorgegebenen Fehler ε, bestimmbar. Wir erhalten Methoden mit<br />
variabler Schrittweite. Dabei kann x (4)<br />
n (ode54) o<strong>der</strong> x (5)<br />
n (ode45) als Ergebnis akzeptiert werden.<br />
In gleicher Weise s<strong>in</strong>d die an<strong>der</strong>en E<strong>in</strong>schrittverfahren <strong>in</strong> Tabelle 4.4, S. 200 zu <strong>in</strong>terpretieren.<br />
Wie die bisher betrachteten expliziten E<strong>in</strong>schritt- (RUNGE-KUTTA-) Verfahren stellt man<br />
auch die impliziten Verfahren (z. B. das EULER-Rückwärts-Verfahren aus Bild 4.3, S. 151) übersichtlich<br />
<strong>in</strong> e<strong>in</strong>em Tableau <strong>der</strong> Struktur<br />
c1 a11 a12 . . . a1,s−1 a1,s<br />
c2 a2,1 a2,2 . . . a2,s−1 a2,s<br />
c3 a3,1 a3,2 . . . a3,s−1 a3,s<br />
.<br />
.<br />
.<br />
.<br />
cs as,1 as,2 . . . as−1,s−1 as,s<br />
b1 b2 . . . bs−1 bs<br />
dar. Beispiel: Die Trapez-Regel<br />
xn+1 = xn + 1<br />
2 h ( f (tn, xn) + f (tn+1, xn+1))<br />
.<br />
.<br />
11<br />
84<br />
11<br />
84<br />
187<br />
2100<br />
kann als zweistufiges implizites RUNGE-KUTTA-Verfahren aufgefasst werden:<br />
k1 = f (tn, xn)<br />
k2 = f (tn + h, xn + h( 1<br />
2 k1 + 1<br />
2 k2))<br />
xn+1 = xn + h<br />
2 (k1 + k2).<br />
0<br />
1<br />
40<br />
zugehörige Tableau<br />
0 1 0<br />
1 1 2<br />
1<br />
2<br />
Nachteil <strong>der</strong> impliziten RUNGE-KUTTA-Verfahren ist, dass die ki nicht nache<strong>in</strong>an<strong>der</strong> berechnet<br />
werden können, son<strong>der</strong>n dass <strong>in</strong> jedem Schritt e<strong>in</strong> i. a. nichtl<strong>in</strong>eares Gleichungssystem von s · N<br />
Gleichungen <strong>in</strong> den k1, . . . , ks gelöst werden muss, wobei N die Dimension des Differenzialgleichungssystems<br />
bezeichnet.<br />
1<br />
2<br />
1<br />
2