O+P Fluidtechnik 3/2017
O+P Fluidtechnik 3/2017
O+P Fluidtechnik 3/2017
- TAGS
- fluidtechnik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
SIMULATION<br />
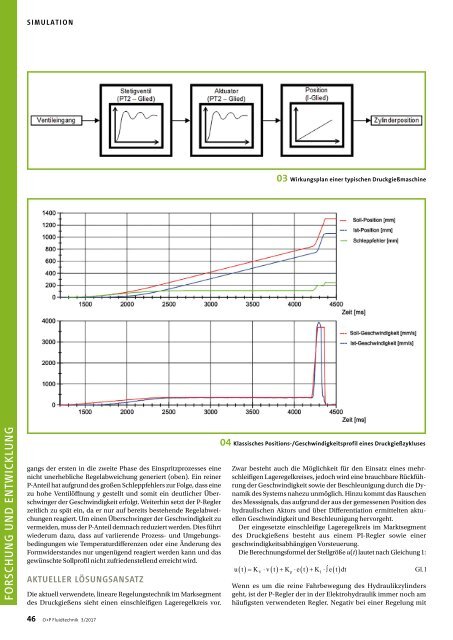
03 Wirkungsplan einer typischen Druckgießmaschine<br />
FORSCHUNG UND ENTWICKLUNG<br />
gangs der ersten in die zweite Phase des Einspritzprozesses eine<br />
nicht unerhebliche Regelabweichung generiert (oben). Ein reiner<br />
P-Anteil hat aufgrund des großen Schleppfehlers zur Folge, dass eine<br />
zu hohe Ventilöffnung y gestellt und somit ein deutlicher Überschwinger<br />
der Geschwindigkeit erfolgt. Weiterhin setzt der P-Regler<br />
zeitlich zu spät ein, da er nur auf bereits bestehende Regelabweichungen<br />
reagiert. Um einen Überschwinger der Geschwindigkeit zu<br />
vermeiden, muss der P-Anteil demnach reduziert werden. Dies führt<br />
wiederum dazu, dass auf variierende Prozess- und Umgebungsbedingungen<br />
wie Temperaturdifferenzen oder eine Änderung des<br />
Formwiderstandes nur ungenügend reagiert werden kann und das<br />
gewünschte Sollprofil nicht zufriedenstellend erreicht wird.<br />
AKTUELLER LÖSUNGSANSATZ<br />
Die aktuell verwendete, lineare Regelungstechnik im Marksegment<br />
des Druckgießens sieht einen einschleifigen Lageregelkreis vor.<br />
04 Klassisches Positions-/Geschwindigkeitsprofil eines Druckgießzykluses<br />
Zwar besteht auch die Möglichkeit für den Einsatz eines mehrschleifigen<br />
Lageregelkreises, jedoch wird eine brauchbare Rückführung<br />
der Geschwindigkeit sowie der Beschleunigung durch die Dynamik<br />
des Systems nahezu unmöglich. Hinzu kommt das Rauschen<br />
des Messsignals, das aufgrund der aus der gemessenen Position des<br />
hydraulischen Aktors und über Differentiation ermittelten aktuellen<br />
Geschwindigkeit und Beschleunigung hervorgeht.<br />
Der eingesetzte einschleifige Lageregelkreis im Marktsegment<br />
des Druckgießens besteht aus einem PI-Regler sowie einer<br />
geschwindigkeitsabhängigen Vorsteuerung.<br />
Die Berechnungsformel der Stellgröße u(t) lautet nach Gleichung 1:<br />
() = ⋅ () + ⋅ () + ⋅ ∫ ()<br />
u t K v t K e t K e t dt Gl.1<br />
V p I<br />
Wenn es um die reine Fahrbewegung des Hydraulikzylinders<br />
geht, ist der P-Regler der in der Elektrohydraulik immer noch am<br />
häufigsten verwendeten Regler. Negativ bei einer Regelung mit<br />
46 <strong>O+P</strong> <strong>Fluidtechnik</strong> 3/<strong>2017</strong>