DER KONSTRUKTEUR 3/2022
DER KONSTRUKTEUR 3/2022
DER KONSTRUKTEUR 3/2022
- Keine Tags gefunden...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
KONSTRUKTIONSELEMENTE<br />
Die eigene Produktion mit einem Cobot effizienter zu gestalten,<br />
scheint kinderleicht zu sein: kaufen, installieren und los geht’s.<br />
Doch wenn ein kollaborierender Roboter wirklich erfolgreich arbeiten<br />
soll, gilt es, vor dem Plug-and-play eine Reihe von Fragen zu<br />
beantworten, damit kein „Plug-and-pray“ draus wird.<br />
Cobots – kleine kollaborierende Roboter – können den<br />
Werker in vielerlei Hinsicht unterstützen. Sie heben<br />
schwere Gegenstände oder übernehmen monotone, einseitig<br />
belastende Aufgaben, wie das wiederholgenaue<br />
Anreichen von Teilen. Damit entlasten sie den Werker und schonen<br />
seine Gesundheit. Auch für bahngesteuerte Tätigkeiten, die ein<br />
Mensch entweder nicht so präzise, dauerhaft oder schnell und<br />
sicher ausführen kann wie eine Maschine, bieten sich kollaborierende<br />
Roboter an. Dazu zählt beispielsweise das Eindrehen besonders<br />
filigraner Schrauben oder das Realisieren von Niet- oder<br />
Klebeverbindungen. Zudem leisten Cobots wertvolle Dienste in<br />
Zeiten des Fachkräftemangels; fehlt es doch in vielen Bereichen<br />
an qualifizierten Mitarbeitern. So sind beispielsweise gut ausgebildete<br />
und erfahrene Schweißer, die präzise Schweißverbindungen<br />
herstellen können, nur noch schwer zu finden. Für Cobots ist das<br />
kein Problem, wenn sie erst einmal angelernt wurden.<br />
ZUSÄTZLICHE ANTRIEBSACHSEN<br />
UND BILDVERARBEITUNG<br />
Die Aufgabe ist klar. Doch wie groß und leistungsstark muss der<br />
Cobot sein, um sie zuverlässig erfüllen zu können und gleichzeitig<br />
nicht überdimensioniert zu sein? Hierzu müssen die Größe und<br />
Leistung des Cobots anhand der zu tragenden Lasten, der erforderlichen<br />
Reichweite, des notwendigen Aktionsradius und der<br />
gewünschten Taktzeiten definiert werden. Im Rahmen dieser<br />
Überlegungen wird schnell deutlich, ob die sechs Antriebsachsen<br />
des kleinen Cobots genügen oder ob sein Aktionsradius durch<br />
eine siebte, achte oder gar neunte Zusatzachse erweitert werden<br />
muss. Die Vergrößerung des Aktionsradius lässt sich z. B. mithilfe<br />
des Lineartechnikportfolios von RK Rose+Krieger erreichen. So<br />
dienen Hubsäulen wie der Powerlift Z der elektrischen Höhenverstellung<br />
des Cobots (Y-Achse). Linearachsen aus der RK Mono -<br />
Line- oder RK DuoLine-Baureihe verfahren den Cobot zusätzlich<br />
auf der X- und Z-Achse und erweitern so seine Reichweite. Denkbar<br />
ist auch, den Cobot noch auf eine Drehvorrichtung zu montieren<br />
und ihn so um die Y-Achse rotieren und damit an verschiedenen<br />
Orten arbeiten zu lassen. Selbst ganze Portalsysteme zur<br />
Reichweitenverlängerung bzw. zur Erweiterung des Aktionsradius<br />
im Raum lassen sich realisieren.<br />
Viele Cobot-Anwendungen benötigen ein System zur Bildverarbeitung.<br />
Dies ist u. a. dann der Fall, wenn der Cobot Teile aus<br />
einer unsortierten Kiste greifen und dem Werker anreichen soll.<br />
Auch für die Qualitätssicherung, beispielsweise bei der optischen<br />
Überprüfung unterschiedlichster Verbindungen oder für die<br />
korrekte Positionierung bei Pick-and-place-Aufgaben, ist eine<br />
Bildverarbeitung unerlässlich.<br />
COBOT O<strong>DER</strong> ROBOT?<br />
Während der Überlegungen zu den Aufgaben des neuen mechanischen<br />
Kollegen stellt sich immer auch die Frage, ob zur Bewältigung<br />
ein Cobot oder ein Robot gebraucht wird. Cobots kommen<br />
dann zum Einsatz, wenn die Anwendung seine dauerhafte Kollaboration<br />
erfordert, er also ständig mit einem Menschen zusammenarbeitet.<br />
Findet die Kollaboration allerdings nur während<br />
des Teach-ins, der Anlernphase, statt und der Prozess läuft dann<br />
autonom ab, ist ein Roboter beziehungsweise Robot gefragt. In<br />
diesem Fall gilt es, zusätzlich über die Art der vorzusehenden<br />
Schutzvorrichtungen wie zum Beispiel das Schutzzaunsystem<br />
von RK Rose+Krieger nachzudenken, wie sie die Maschinenrichtlinie<br />
vorschreibt.<br />
01<br />
02<br />
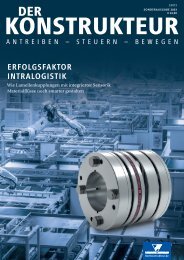
01 Eine Rotations- und Linearachse ermöglicht eine Unabhängigkeit<br />
der Rotation des Roboters von den Winkelgrenzen des Roboter-<br />
Basisgelenks: Der Rotationsmittelpunkt wird aus der vertikalen<br />
Achse des Portals verschoben<br />
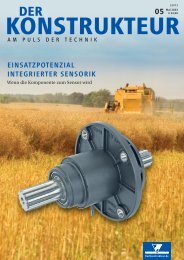
02 Auf der zusätzlichen Linearachse in X-Richtung kann der<br />
Cobot vom Ablage- zum Arbeitsplatz hin- und zurückfahren<br />
www.derkonstrukteur.de <strong>DER</strong> <strong>KONSTRUKTEUR</strong> <strong>2022</strong>/03 31