Positioniersysteme - Lineartechnik Korb
Positioniersysteme - Lineartechnik Korb
Positioniersysteme - Lineartechnik Korb

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
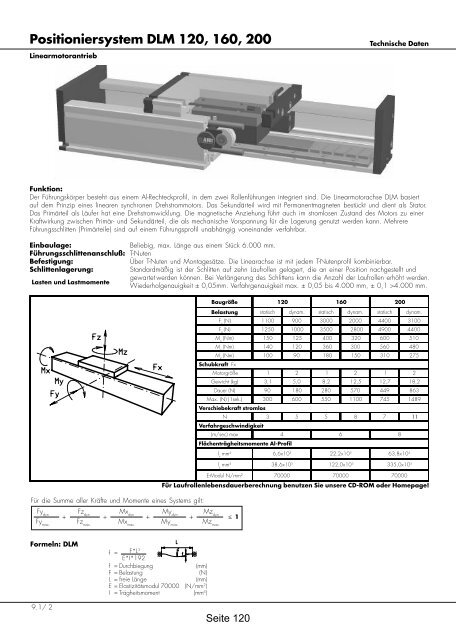
Positioniersystem DLM 120, 160, 200 Technische Daten<br />
Linearmotorantrieb<br />
Funktion:<br />
Der Führungskörper besteht aus einem Al-Rechteckprofil, in dem zwei Rollenführungen integriert sind. Die Linearmotorachse DLM basiert<br />
auf dem Prinzip eines linearen synchronen Drehstrommotors. Das Sekundärteil wird mit Permanentmagneten bestückt und dient als Stator.<br />
Das Primärteil als Läufer hat eine Drehstromwicklung. Die magnetische Anziehung führt auch im stromlosen Zustand des Motors zu einer<br />
Kraftwirkung zwischen Primär- und Sekundärteil, die als mechanische Vorspannung für die Lagerung genutzt werden kann. Mehrere<br />
Führungsschlitten (Primärteile) sind auf einem Führungsprofil unabhängig voneinander verfahrbar.<br />
Einbaulage: Beliebig, max. Länge aus einem Stück 6.000 mm.<br />
Führungsschlittenanschluß: T-Nuten<br />
Befestigung: Über T-Nuten und Montagesätze. Die Linearachse ist mit jedem T-Nutenprofil kombinierbar.<br />
Schlittenlagerung: Standardmäßig ist der Schlitten auf zehn Laufrollen gelagert, die an einer Position nachgestellt und<br />
Lasten und Lastmomente<br />
gewartet werden können. Bei Verlängerung des Schlittens kann die Anzahl der Laufrollen erhöht werden.<br />
Wiederholgenauigkeit ± 0,05mm. Verfahrgenauigkeit max. ± 0,05 bis 4.000 mm, ± 0,1 >4.000 mm.<br />
Für die Summe aller Kräfte und Momente eines Systems gilt:<br />
Fydyn Fymax. +<br />
Fzdyn Fzmax. +<br />
Mxdyn Mxmax. +<br />
Mydyn Mymax. Mzdyn + £ 1<br />
Mzmax. Formeln: DLM<br />
9.1/ 2<br />
F*L 3<br />
f =<br />
E*I*192<br />
f = Durchbiegung (mm)<br />
F = Belastung (N)<br />
L = freie Länge (mm)<br />
E = Elastizitätsmodul 70000 (N/mm2 )<br />
I = Trägheitsmoment (mm4 )<br />
Baugröße 120 160 200<br />
Belastung statisch dynam. statisch dynam. statisch dynam.<br />
F (N) y 1100 900 3000 2000 4400 3100<br />
F (N) z 1250 1000 3500 2800 4900 4400<br />
M (Nm) x 150 125 400 320 600 510<br />
M (Nm) y 140 120 360 300 560 480<br />
M (Nm) z<br />
Schubkraft Fx<br />
100 90 180 150 310 275<br />
Motorgröße 1 2 1 2 1 2<br />
Gewicht (kg) 3,1 5,0 8,2 12,5 12,7 18,2<br />
Dauer (N) 90 180 280 570 449 863<br />
Max. (N) (1sek.) 300 600 550 1100 745 1489<br />
Verschiebekraft stromlos<br />
N<br />
Verfahrgeschwindigkeit<br />
3 5 5 8 7 11<br />
(m/sec) max 4 6 8<br />
Flächenträgheitsmomente Al-Profil<br />
l x mm 4 6,6x10 5 22,2x10 5 63,8x10 5<br />
l y mm 4 38,6x10 5 122,0x10 5 335,0x10 5<br />
E-Modul N/mm² 70000 70000 70000<br />
Für Laufrollenlebensdauerberechnung benutzen Sie unsere CD-ROM oder Homepage!<br />
Seite 120