Positioniersysteme - Lineartechnik Korb
Positioniersysteme - Lineartechnik Korb
Positioniersysteme - Lineartechnik Korb

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
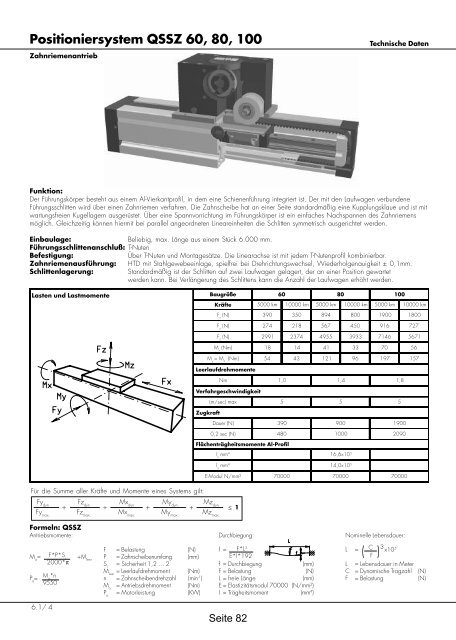
Positioniersystem QSSZ 60, 80, 100<br />
Zahnriemenantrieb<br />
Funktion:<br />
Der Führungskörper besteht aus einem Al-Vierkantprofil, in dem eine Schienenführung integriert ist. Der mit den Laufwagen verbundene<br />
Führungsschlitten wird über einen Zahnriemen verfahren. Die Zahnscheibe hat an einer Seite standardmäßig eine Kupplungsklaue und ist mit<br />
wartungsfreien Kugellagern ausgerüstet. Über eine Spannvorrichtung im Führungskörper ist ein einfaches Nachspannen des Zahnriemens<br />
möglich. Gleichzeitig können hiermit bei parallel angeordneten Lineareinheiten die Schlitten symmetrisch ausgerichtet werden.<br />
Einbaulage: Beliebig, max. Länge aus einem Stück 6.000 mm.<br />
Führungsschlittenanschluß: T-Nuten<br />
Befestigung: Über T-Nuten und Montagesätze. Die Linearachse ist mit jedem T-Nutenprofil kombinierbar.<br />
Zahnriemenausführung: HTD mit Stahlgewebeeinlage, spielfrei bei Drehrichtungswechsel, Wiederholgenauigkeit ± 0,1mm.<br />
Schlittenlagerung: Standardmäßig ist der Schlitten auf zwei Laufwagen gelagert, der an einer Position gewartet<br />
werden kann. Bei Verlängerung des Schlittens kann die Anzahl der Laufwagen erhöht werden.<br />
Lasten und Lastmomente<br />
Formeln: QSSZ<br />
Antriebsmomente: Durchbiegung: Nominelle Lebensdauer:<br />
F = Belastung (N) f = L = x105 M = +M P = Zahnscheibenumfang (mm)<br />
a leer<br />
S = Sicherheit 1,2 ... 2 f = Durchbiegung (mm) L = Lebensdauer in Meter<br />
i<br />
M = Leerlaufdrehmoment (Nm) F = Belastung (N) C = Dynamische Tragzahl (N)<br />
leer<br />
P = n = Zahnscheibendrehzahl (min a -1 ) L = freie Länge (mm) F = Belastung (N)<br />
M = Antriebsdrehmoment (Nm) E = Elastizitätsmodul 70000 (N/mm²)<br />
a<br />
P = Motorleistung (KW) I = Trägheitsmoment (mm a 4 F*L<br />
F*P*Si 2000*π<br />
M *n a<br />
9550<br />
)<br />
3<br />
C<br />
E*I*192<br />
F<br />
6.1/ 4<br />
Baugröße 60 80 100<br />
Kräfte 5000 km 10000 km 5000 km 10000 km 5000 km 10000 km<br />
F x (N) 390 350 894 800 1900 1800<br />
F y (N) 274 218 567 450 916 727<br />
F z (N) 2991 2374 4955 3933 7146 5671<br />
M x (Nm) 18 14 41 33 70 56<br />
M y = M z (Nm) 54 43 121 96 197 157<br />
Leerlaufdrehmomente<br />
Nm 1,0 1,4 1,8<br />
Verfahrgeschwindigkeit<br />
Zugkraft<br />
Für die Summe aller Kräfte und Momente eines Systems gilt:<br />
Fydyn Fymax. +<br />
Fzdyn Fzmax. +<br />
Mxdyn Mxmax. +<br />
Mydyn Mymax. Mzdyn + £ 1<br />
Mzmax. (m/sec) max 5 5 5<br />
Dauer (N) 390 900 1900<br />
0,2 sec (N) 480 1000 2090<br />
Flächenträgheitsmomente Al-Profil<br />
l x mm 4 16,6x10 5<br />
l y mm 4 14,0x10 5<br />
Technische Daten<br />
E-Modul N/mm² 70000 70000 70000<br />
Seite 82<br />
( ) 3