3 Aufgabe 2 - Fakultät für Elektrotechnik und Informationstechnik ...
3 Aufgabe 2 - Fakultät für Elektrotechnik und Informationstechnik ...
3 Aufgabe 2 - Fakultät für Elektrotechnik und Informationstechnik ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
s0(k)<br />
00 11 00 11<br />
01<br />
01<br />
00 11 00 11 00 11 00 11<br />
00 11 00 11 00 11 00 11 010101<br />
01<br />
01<br />
01<br />
01<br />
00 11 01<br />
00 110101 00 11 00 11 00 11 00 11010<br />
1<br />
y1(k)<br />
y2(k)<br />
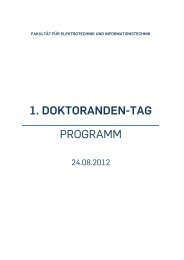
Bild 4: Quellenlokalisation in reflektionsbehafteter Umgebung. Anstelle eines Verzögerungselementes<br />
erscheint hier hinter dem oberen Mikrofon ein Filter w, dessen Koeffizienten adaptiv<br />
so eingestellt werden, dass der mittlere Fehler zwischen oberen <strong>und</strong> unterem Pfad minimal<br />
wird.<br />
Reflektionsbehaftete Umgebung<br />
In den meisten Fällen ist es realistischer, eine reflektionsbehaftete Umgebung anzunehmen.<br />
In diesem Fall enthält die Raumimpulsantwort außer dem dominierenden Direktschall<br />
(verzögert <strong>und</strong> skaliert wie im reflektionsarmen Fall) nun auch die Raumreflektionen. Daher<br />
liefert ein einfaches Verzögerungsglied hier keine optimalen Ergebnisse. Stattdessen wird wie<br />
in Bild 4 dargestellt ein Filter so adaptiert, dass die mittlere Abweichung zwischen beiden<br />
Mikrofonsignalen möglichst klein wird. Die Position des Maximums in der geschätzten<br />
Impulsantwort des Filters bestimmt nun den TDOA <strong>und</strong> wird wie zuvor in den gesuchten<br />
Winkel θ umgerechnet. Im Falle einer reflektionsfreien Umgebung würde ein solches<br />
adaptives Filter wieder zu einem verzögerten <strong>und</strong> skalierten Einheitsimpuls konvergieren.<br />
Die optimale Adaption der Filterkoeffizienten w erfolgt z.B. mit dem Least Mean Square<br />
(LMS) Verfahren, welches in den folgenden Abschnitten eingeführt wird.<br />
2.3 Wiener Filter <strong>und</strong> NLMS-Algorithmus<br />
Die Algorithmen der Störsignal- <strong>und</strong> Nachhallreduktion <strong>und</strong> der akustischen Echokompensation<br />
beinhalten in ihrem Kern adaptive Optimalfilter. Das adaptive Optimalfilter hat die<br />
<strong>Aufgabe</strong>, das Eingangssignal des Filters so zu verändern, dass unter fortlaufender Anpassung<br />
an die Signalstatistik der Fehler zwischen dem Ausgangssignal <strong>und</strong> einem Referenzsignal<br />
minimiert wird. Das hinsichtlich des mittleren quadratischen Fehlers optimale Filter ist<br />
<strong>für</strong> stationäre Signale in der Literatur als Wiener Filter bekannt, z.B. [?]. Da sich einige<br />
gr<strong>und</strong>sätzliche Eigenschaften optimaler Filter besonders elegant mit Hilfe des Wiener Filters<br />
darstellen lassen, wird als Ausgangspunkt dieses Kapitels zunächst das FIR Wiener<br />
Filter betrachtet. Daran anschließend folgt eine Diskussion des LMS-Algorithmus (Least<br />
Mean Square Algorithmus) <strong>und</strong> des NLMS-Algorithmus (Normalized Least Mean Square<br />
Algorithmus).<br />
Prinzip des Optimalfilters<br />
In Bild 5 ist der Signalfluss des Optimalfilters skizziert. Das Eingangssignal x(k), von dem<br />
IT-V3 - 5<br />
w<br />
e(k)<br />
−