3 Aufgabe 2 - Fakultät für Elektrotechnik und Informationstechnik ...
3 Aufgabe 2 - Fakultät für Elektrotechnik und Informationstechnik ...
3 Aufgabe 2 - Fakultät für Elektrotechnik und Informationstechnik ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
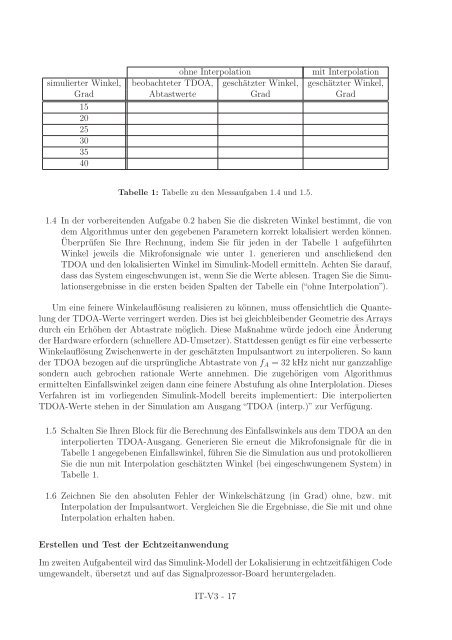
ohne Interpolation mit Interpolation<br />
simulierter Winkel, beobachteter TDOA, geschätzter Winkel, geschätzter Winkel,<br />
Grad Abtastwerte Grad Grad<br />
15<br />
20<br />
25<br />
30<br />
35<br />
40<br />
Tabelle 1: Tabelle zu den Messaufgaben 1.4 <strong>und</strong> 1.5.<br />
1.4 In der vorbereitenden <strong>Aufgabe</strong> 0.2 haben Sie die diskreten Winkel bestimmt, die von<br />
dem Algorithmus unter den gegebenen Parametern korrekt lokalisiert werden können.<br />
Überprüfen Sie Ihre Rechnung, indem Sie <strong>für</strong> jeden in der Tabelle 1 aufgeführten<br />
Winkel jeweils die Mikrofonsignale wie unter 1. generieren <strong>und</strong> anschließend den<br />
TDOA <strong>und</strong> den lokalisierten Winkel im Simulink-Modell ermitteln. Achten Sie darauf,<br />
dass das System eingeschwungen ist, wenn Sie die Werte ablesen. Tragen Sie die Simulationsergebnisse<br />
in die ersten beiden Spalten der Tabelle ein (“ohne Interpolation”).<br />
Um eine feinere Winkelauflösung realisieren zu können, muss offensichtlich die Quantelung<br />
der TDOA-Werte verringert werden. Dies ist bei gleichbleibender Geometrie des Arrays<br />
durch ein Erhöhen der Abtastrate möglich. Diese Maßnahme würde jedoch eine Änderung<br />
der Hardware erfordern (schnellere AD-Umsetzer). Stattdessen genügt es <strong>für</strong> eine verbesserte<br />
Winkelauflösung Zwischenwerte in der geschätzten Impulsantwort zu interpolieren. So kann<br />
der TDOA bezogen auf die ursprüngliche Abtastrate von fA = 32 kHz nicht nur ganzzahlige<br />
sondern auch gebrochen rationale Werte annehmen. Die zugehörigen vom Algorithmus<br />
ermittelten Einfallswinkel zeigen dann eine feinere Abstufung als ohne Interplolation. Dieses<br />
Verfahren ist im vorliegenden Simulink-Modell bereits implementiert: Die interpolierten<br />
TDOA-Werte stehen in der Simulation am Ausgang “TDOA (interp.)” zur Verfügung.<br />
1.5 Schalten Sie Ihren Block <strong>für</strong> die Berechnung des Einfallswinkels aus dem TDOA an den<br />
interpolierten TDOA-Ausgang. Generieren Sie erneut die Mikrofonsignale <strong>für</strong> die in<br />
Tabelle 1 angegebenen Einfallswinkel, führen Sie die Simulation aus <strong>und</strong> protokollieren<br />
Sie die nun mit Interpolation geschätzten Winkel (bei eingeschwungenem System) in<br />
Tabelle 1.<br />
1.6 Zeichnen Sie den absoluten Fehler der Winkelschätzung (in Grad) ohne, bzw. mit<br />
Interpolation der Impulsantwort. Vergleichen Sie die Ergebnisse, die Sie mit <strong>und</strong> ohne<br />
Interpolation erhalten haben.<br />
Erstellen <strong>und</strong> Test der Echtzeitanwendung<br />
Im zweiten <strong>Aufgabe</strong>nteil wird das Simulink-Modell der Lokalisierung in echtzeitfähigen Code<br />
umgewandelt, übersetzt <strong>und</strong> auf das Signalprozessor-Board heruntergeladen.<br />
IT-V3 - 17