

guidance, flight mechanics and trajectory optimization
guidance, flight mechanics and trajectory optimization
guidance, flight mechanics and trajectory optimization

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
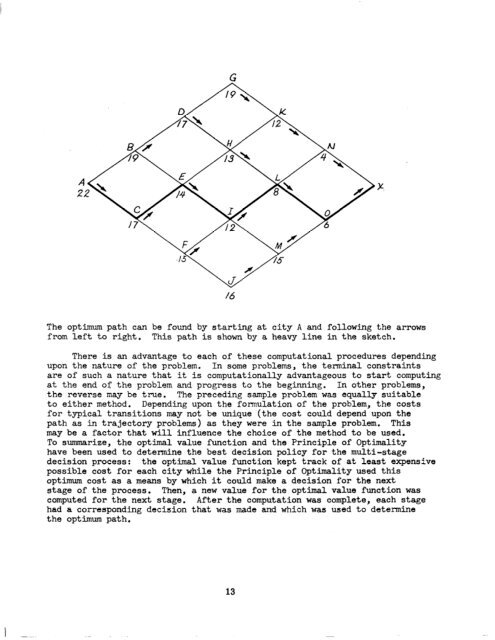
The optimum path can be found by starting at city A <strong>and</strong> following the arrows<br />
from left to right. This path is shown by a heavy line in the sketch.<br />
There is an advantage to each of these computational procedures depending<br />
upon the nature of the problem. In some problems, the terminal constraints<br />
are of such a nature that it is computationally advantageous to start computing<br />
at the end of the problem <strong>and</strong> progress to the beginning. In other problems,<br />
the reverse may be true. The preceding sample problem was equally suitable<br />
to either method. Depending upon the formulation of the problem, the costs<br />
for typical transitions may not be unique (the cost could depend upon the<br />
path as in <strong>trajectory</strong> problems) as they were in the sample problem. This<br />
may be a factor that will influence the choice of the method to be used.<br />
To summarize, the optimal value function <strong>and</strong> the Principle of Optimality<br />
have been used to determine the best decision policy for the multi-stage<br />
decision process: the optimal value function kept track of at least expensive<br />
possible cost for each city while the Principle of Optimality used this<br />
optimum cost as a means by which it could make a decision for the next<br />
stage of the process. Then, a new value for the optimal value function was<br />
computed for the next stage. After the computation was complete, each stage<br />
had a corresponding decision that was made <strong>and</strong> which was used to determine<br />
the optimum path.<br />
13














