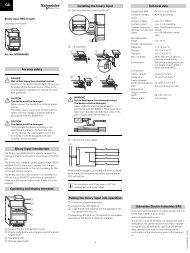
Structure of Actuator KNX S-B4T-UP 230 V AC - IQmarket
Structure of Actuator KNX S-B4T-UP 230 V AC - IQmarket
Structure of Actuator KNX S-B4T-UP 230 V AC - IQmarket

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
If “Accomplish reference run: Yes“ has been selected:<br />
in case <strong>of</strong> more than<br />
operations before one auto. position run<br />
1 … 255<br />
The reference run is always accomplished in the direction <strong>of</strong> the safe position.<br />
If “Send drive position after change: Yes” has been selected:<br />
Transmission delay <strong>of</strong> the position in 0.1 sec 0 … 50<br />
Blind control<br />
The setting options correspond with those <strong>of</strong> a roller shutter or an awning.<br />
Use operating range limit<br />
Behaviour in case <strong>of</strong> bus voltage breakdown<br />
Use monitoring <strong>of</strong> alarm and blocking objects<br />
No • Yes<br />
No action • Stop •<br />
<strong>UP</strong>-command • DOWN-command<br />
No • Yes<br />
Operating range limit<br />
The operating range limit is used in order to avoid that two units collide with each other<br />
(e.g. an awning and a window which is about to open).<br />
One <strong>of</strong> two drive mechanisms is prioritised and is parameterised as master and the<br />
other one as slave. By means <strong>of</strong> zero position sensors, both actuators know the own<br />
current status and the current status <strong>of</strong> the other one. This one is either “in a safe<br />
position“ or “not in a safe position“. The safe position is reached as soon as the drive<br />
14