NOAA Protocols for Fisheries Acoustics Surveys and Related ...
NOAA Protocols for Fisheries Acoustics Surveys and Related ...
NOAA Protocols for Fisheries Acoustics Surveys and Related ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
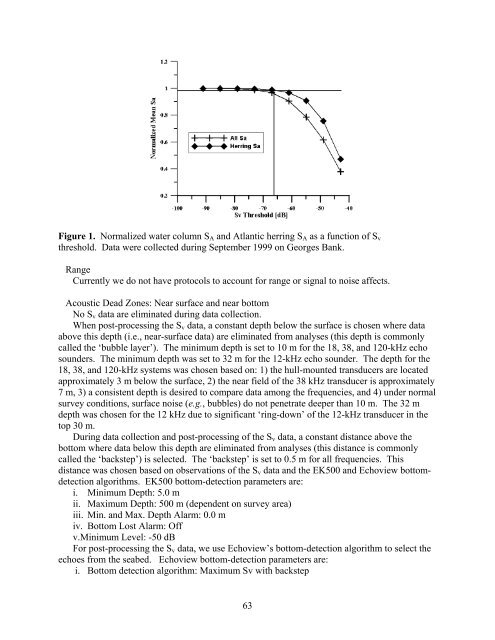
Figure 1. Normalized water column S A <strong>and</strong> Atlantic herring S A as a function of S v<br />
threshold. Data were collected during September 1999 on Georges Bank.<br />
Range<br />
Currently we do not have protocols to account <strong>for</strong> range or signal to noise affects.<br />
Acoustic Dead Zones: Near surface <strong>and</strong> near bottom<br />
No S v data are eliminated during data collection.<br />
When post-processing the S v data, a constant depth below the surface is chosen where data<br />
above this depth (i.e., near-surface data) are eliminated from analyses (this depth is commonly<br />
called the ‘bubble layer’). The minimum depth is set to 10 m <strong>for</strong> the 18, 38, <strong>and</strong> 120-kHz echo<br />
sounders. The minimum depth was set to 32 m <strong>for</strong> the 12-kHz echo sounder. The depth <strong>for</strong> the<br />
18, 38, <strong>and</strong> 120-kHz systems was chosen based on: 1) the hull-mounted transducers are located<br />
approximately 3 m below the surface, 2) the near field of the 38 kHz transducer is approximately<br />
7 m, 3) a consistent depth is desired to compare data among the frequencies, <strong>and</strong> 4) under normal<br />
survey conditions, surface noise (e.g., bubbles) do not penetrate deeper than 10 m. The 32 m<br />
depth was chosen <strong>for</strong> the 12 kHz due to significant ‘ring-down’ of the 12-kHz transducer in the<br />
top 30 m.<br />
During data collection <strong>and</strong> post-processing of the S v data, a constant distance above the<br />
bottom where data below this depth are eliminated from analyses (this distance is commonly<br />
called the ‘backstep’) is selected. The ‘backstep’ is set to 0.5 m <strong>for</strong> all frequencies. This<br />
distance was chosen based on observations of the S v data <strong>and</strong> the EK500 <strong>and</strong> Echoview bottomdetection<br />
algorithms. EK500 bottom-detection parameters are:<br />
i. Minimum Depth: 5.0 m<br />
ii. Maximum Depth: 500 m (dependent on survey area)<br />
iii. Min. <strong>and</strong> Max. Depth Alarm: 0.0 m<br />
iv. Bottom Lost Alarm: Off<br />
v.Minimum Level: -50 dB<br />
For post-processing the S v data, we use Echoview’s bottom-detection algorithm to select the<br />
echoes from the seabed. Echoview bottom-detection parameters are:<br />
i. Bottom detection algorithm: Maximum Sv with backstep<br />
63