

KR QUANTEC ultra - KUKA Robotics
KR QUANTEC ultra - KUKA Robotics
KR QUANTEC ultra - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>KR</strong> <strong>QUANTEC</strong> <strong>ultra</strong><br />
Axis<br />
Range of motion, softwarelimited<br />
Speed with<br />
rated payload<br />
4 +/-350° 136°/s<br />
5 +/-122.5° 129°/s<br />
6 +/-350° 206°/s<br />
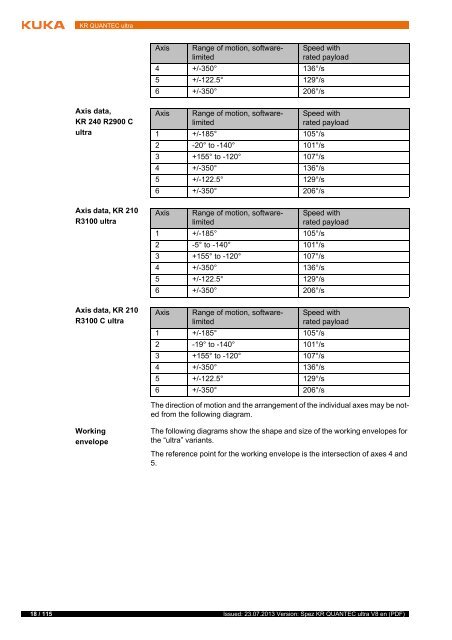
Axis data,<br />
<strong>KR</strong> 240 R2900 C<br />
<strong>ultra</strong><br />
Axis data, <strong>KR</strong> 210<br />
R3100 <strong>ultra</strong><br />
Axis data, <strong>KR</strong> 210<br />
R3100 C <strong>ultra</strong><br />
Axis<br />
Range of motion, softwarelimited<br />
Speed with<br />
rated payload<br />
1 +/-185° 105°/s<br />
2 -20° to -140° 101°/s<br />
3 +155° to -120° 107°/s<br />
4 +/-350° 136°/s<br />
5 +/-122.5° 129°/s<br />
6 +/-350° 206°/s<br />
Axis<br />
Range of motion, softwarelimited<br />
Speed with<br />
rated payload<br />
1 +/-185° 105°/s<br />
2 -5° to -140° 101°/s<br />
3 +155° to -120° 107°/s<br />
4 +/-350° 136°/s<br />
5 +/-122.5° 129°/s<br />
6 +/-350° 206°/s<br />
Axis<br />
Range of motion, softwarelimited<br />
Speed with<br />
rated payload<br />
1 +/-185° 105°/s<br />
2 -19° to -140° 101°/s<br />
3 +155° to -120° 107°/s<br />
4 +/-350° 136°/s<br />
5 +/-122.5° 129°/s<br />
6 +/-350° 206°/s<br />
The direction of motion and the arrangement of the individual axes may be noted<br />
from the following diagram.<br />
Working<br />
envelope<br />
The following diagrams show the shape and size of the working envelopes for<br />
the “<strong>ultra</strong>” variants.<br />
The reference point for the working envelope is the intersection of axes 4 and<br />
5.<br />
18 / 115 Issued: 23.07.2013 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>ultra</strong> V8 en (PDF)














