

KR QUANTEC ultra - KUKA Robotics
KR QUANTEC ultra - KUKA Robotics
KR QUANTEC ultra - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>KR</strong> <strong>QUANTEC</strong> <strong>ultra</strong><br />
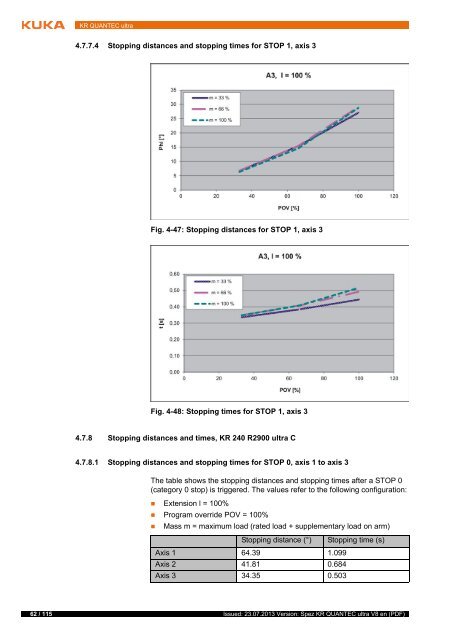
4.7.7.4 Stopping distances and stopping times for STOP 1, axis 3<br />
Fig. 4-47: Stopping distances for STOP 1, axis 3<br />
Fig. 4-48: Stopping times for STOP 1, axis 3<br />
4.7.8 Stopping distances and times, <strong>KR</strong> 240 R2900 <strong>ultra</strong> C<br />
4.7.8.1 Stopping distances and stopping times for STOP 0, axis 1 to axis 3<br />
The table shows the stopping distances and stopping times after a STOP 0<br />
(category 0 stop) is triggered. The values refer to the following configuration:<br />
• Extension l = 100%<br />
• Program override POV = 100%<br />
• Mass m = maximum load (rated load + supplementary load on arm)<br />
Stopping distance (°)<br />
Axis 1 64.39 1.099<br />
Axis 2 41.81 0.684<br />
Axis 3 34.35 0.503<br />
Stopping time (s)<br />
62 / 115 Issued: 23.07.2013 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>ultra</strong> V8 en (PDF)














