

Piccolo system user guide - Unmanned Aircraft & Drones
Piccolo system user guide - Unmanned Aircraft & Drones
Piccolo system user guide - Unmanned Aircraft & Drones

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Clo ud Cap<br />
Technology<br />
PO Box 1500, No. 8 Fourth St, Hood River, OR 97031, ph 541 387 2120, fax 541 387 2030<br />
angle disturbance rejection.<br />
Pitch Pitch angle Elevator Damps out pitch oscillations.<br />
Yaw Yaw rate Rudder Damps out yaw oscillations.<br />
Turn compensator<br />
Commanded<br />
turn rate,<br />
Pitch rate<br />
Elevator<br />
Helps maintain the TAS command when<br />
entering or exiting a turn.<br />
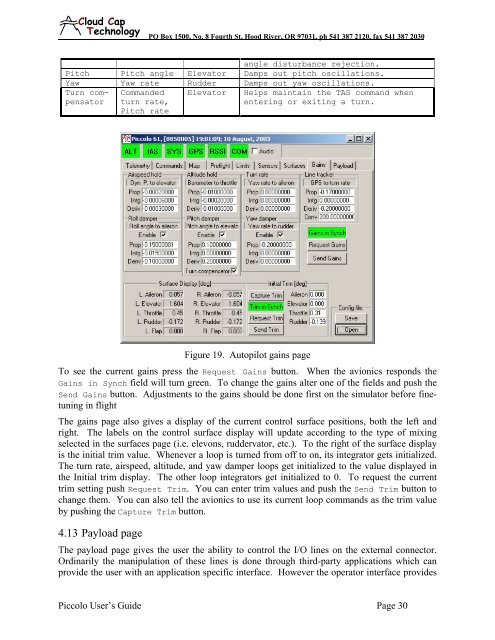
Figure 19. Autopilot gains page<br />
To see the current gains press the Request Gains button. When the avionics responds the<br />
Gains in Synch field will turn green. To change the gains alter one of the fields and push the<br />
Send Gains button. Adjustments to the gains should be done first on the simulator before finetuning<br />
in flight<br />
The gains page also gives a display of the current control surface positions, both the left and<br />
right. The labels on the control surface display will update according to the type of mixing<br />
selected in the surfaces page (i.e. elevons, ruddervator, etc.). To the right of the surface display<br />
is the initial trim value. Whenever a loop is turned from off to on, its integrator gets initialized.<br />
The turn rate, airspeed, altitude, and yaw damper loops get initialized to the value displayed in<br />
the Initial trim display. The other loop integrators get initialized to 0. To request the current<br />
trim setting push Request Trim. You can enter trim values and push the Send Trim button to<br />
change them. You can also tell the avionics to use its current loop commands as the trim value<br />
by pushing the Capture Trim button.<br />
4.13 Payload page<br />
The payload page gives the <strong>user</strong> the ability to control the I/O lines on the external connector.<br />
Ordinarily the manipulation of these lines is done through third-party applications which can<br />
provide the <strong>user</strong> with an application specific interface. However the operator interface provides<br />
<strong>Piccolo</strong> User’s Guide Page 30














