Pneumatic Modular Gripping System
Pneumatic Modular Gripping System - Spinet
Pneumatic Modular Gripping System - Spinet

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
EGN 100<br />
Electrical • 2-Finger Parallel Gripper • Universal Gripper<br />
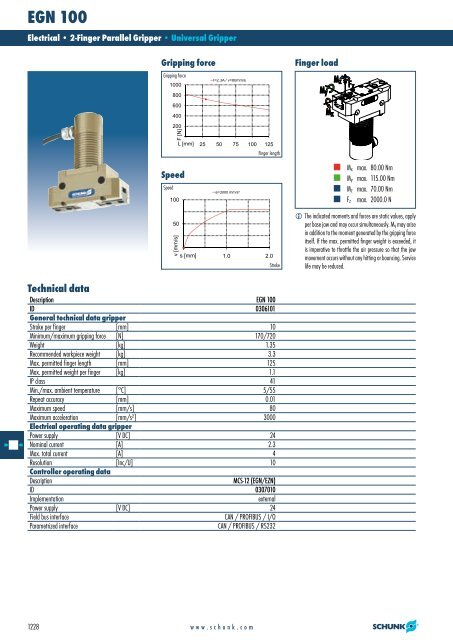
<strong>Gripping</strong> force<br />
<strong>Gripping</strong> force<br />
Finger load<br />
Finger length<br />
Speed<br />
Speed<br />
Mx max. 80.00 Nm<br />
My max. 115.00 Nm<br />
Mz max. 70.00 Nm<br />
max. 2000.0 N<br />
Fz<br />
Stroke<br />
i The indicated moments and forces are static values, apply<br />
per base jaw and may occur simultaneously. M y may arise<br />
in addition to the moment generated by the gripping force<br />
itself. If the max. permitted finger weight is exceeded, it<br />
is imperative to throttle the air pressure so that the jaw<br />
movement occurs without any hitting or bouncing. Service<br />
life may be reduced.<br />
Technical data<br />
Description EGN 100<br />
ID 0306101<br />
General technical data gripper<br />
Stroke per finger [mm] 10<br />
Minimum/maximum gripping force [N] 170/720<br />
Weight [kg] 1.35<br />
Recommended workpiece weight [kg] 3.3<br />
Max. permitted finger length [mm] 125<br />
Max. permitted weight per finger [kg] 1.1<br />
IP class 41<br />
Min./max. ambient temperature [°C] 5/55<br />
Repeat accuracy [mm] 0.01<br />
Maximum speed [mm/s] 80<br />
Maximum acceleration [mm/s²] 3000<br />
Electrical operating data gripper<br />
Power supply [V DC] 24<br />
Nominal current [A] 2.3<br />
Max. total current [A] 4<br />
Resolution [Inc/U] 10<br />
Controller operating data<br />
Description<br />
MCS-12 (EGN/EZN)<br />
ID 0307010<br />
Implementation<br />
external<br />
Power supply [V DC] 24<br />
Field bus interface<br />
CAN / PROFIBUS / I/O<br />
Parametrized interface<br />
CAN / PROFIBUS / RS232<br />
1228<br />
www.schunk.com