code_of_practice_V3_2019

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
“Designated Person” identified in the IMO ISM Code as a person ashore who should be designated by the company<br />
who has direct access to the highest level <strong>of</strong> management.<br />
“Emergency Stop” means the ability to reduce propulsion to a safe state in a timely manner. In this context:<br />
n “a safe state” means a level at which it is not likely to cause damage either directly or indirectly. Note that some<br />
MASS (e.g. wave propelled) may not have any means <strong>of</strong> cutting propulsion power to zero; but in a harbour or<br />
sheltered waters the wave propulsive power may reasonably be expected to be a safely low level;<br />
n “in a timely manner” means within a time that is short enough to ensure that the risk from uncontrolled propulsive<br />
power can be contained before it is likely to cause damage. In open ocean conditions this may be relaxed, whereas<br />
in a docking situation the propulsion may need to be cut more quickly, within seconds or less;<br />
n “Full Shut Down” means the ability to turn <strong>of</strong>f all systems as required on the MASS remotely, for example in the<br />
case <strong>of</strong> a fire.<br />
"Length" and "(L)" in relation to a ship means the greater <strong>of</strong> the following distances:<br />
n 96% <strong>of</strong> the total length on the waterline at 85% <strong>of</strong> the least moulded depth measured from the top <strong>of</strong> the keel, OR<br />
the length from the fore-side <strong>of</strong> the stem to the axis <strong>of</strong> the rudder stock on that waterline.<br />
n Where the stem contour is concave above the waterline at 85% <strong>of</strong> the least moulded depth, both the forward terminal<br />
<strong>of</strong> the total length and the fore-side <strong>of</strong> the stem respectively shall be taken at the vertical projection to that waterline<br />
<strong>of</strong> the aftermost point <strong>of</strong> the stem contour (above that waterline). In ships designed with a rake <strong>of</strong> keel the waterline<br />
on which this length is measured shall be parallel to the designed waterline;<br />
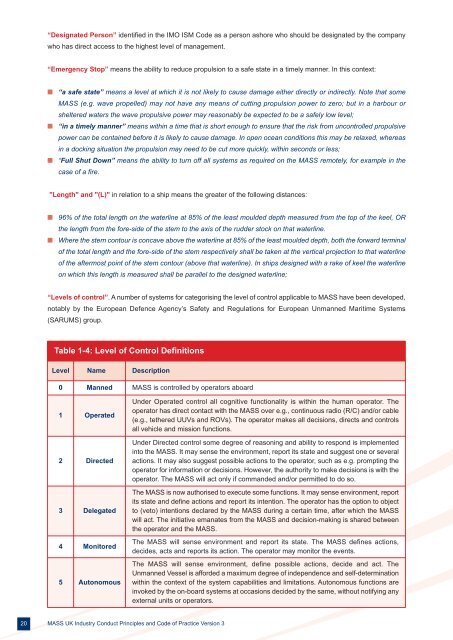
“Levels <strong>of</strong> control”. A number <strong>of</strong> systems for categorising the level <strong>of</strong> control applicable to MASS have been developed,<br />
notably by the European Defence Agency’s Safety and Regulations for European Unmanned Maritime Systems<br />
(SARUMS) group.<br />
Table 1-4: Level <strong>of</strong> Control Definitions<br />
Level Name Description<br />
0 Manned MASS is controlled by operators aboard<br />
1 Operated<br />
2 Directed<br />
3 Delegated<br />
4 Monitored<br />
5 Autonomous<br />
Under Operated control all cognitive functionality is within the human operator. The<br />
operator has direct contact with the MASS over e.g., continuous radio (R/C) and/or cable<br />
(e.g., tethered UUVs and ROVs). The operator makes all decisions, directs and controls<br />
all vehicle and mission functions.<br />
Under Directed control some degree <strong>of</strong> reasoning and ability to respond is implemented<br />
into the MASS. It may sense the environment, report its state and suggest one or several<br />
actions. It may also suggest possible actions to the operator, such as e.g. prompting the<br />
operator for information or decisions. However, the authority to make decisions is with the<br />
operator. The MASS will act only if commanded and/or permitted to do so.<br />
The MASS is now authorised to execute some functions. It may sense environment, report<br />
its state and define actions and report its intention. The operator has the option to object<br />
to (veto) intentions declared by the MASS during a certain time, after which the MASS<br />
will act. The initiative emanates from the MASS and decision-making is shared between<br />
the operator and the MASS.<br />
The MASS will sense environment and report its state. The MASS defines actions,<br />
decides, acts and reports its action. The operator may monitor the events.<br />
The MASS will sense environment, define possible actions, decide and act. The<br />
Unmanned Vessel is afforded a maximum degree <strong>of</strong> independence and self-determination<br />
within the context <strong>of</strong> the system capabilities and limitations. Autonomous functions are<br />
invoked by the on-board systems at occasions decided by the same, without notifying any<br />
external units or operators.<br />
20<br />
MASS UK Industry Conduct Principles and Code <strong>of</strong> Practice Version 3