- Page 2 and 3:
Mechanics of Fluids
- Page 4 and 5:
Mechanics of Fluids Eighth edition
- Page 6 and 7:
Contents Preface to the eighth edit
- Page 8 and 9:
8 Boundary Layers, Wakes and Other
- Page 10 and 11:
Preface to the eighth edition In th
- Page 12 and 13:
Fundamental concepts 1 The aim of C
- Page 14 and 15:
1.1.1 Molecular structure The diffe
- Page 16 and 17:
therefore, to have in place systems
- Page 18 and 19:
has been a strong movement in favou
- Page 20 and 21:
Notation, dimensions, units and rel
- Page 22 and 23:
is nearer 2 m, rather than 1 m. Her
- Page 24 and 25:
Properties of fluids 13 The relativ
- Page 26 and 27:
that is, p1 − p3 = 1 2BC ϱax (1.
- Page 28 and 29:
that there is an almost perfect vac
- Page 30 and 31:
calorically perfect. (Some writers
- Page 32 and 33:
As a liquid is compressed its molec
- Page 34 and 35: or τ = µ ∂u ∂y (1.9) where µ
- Page 36 and 37: shared among the occupants of bb, a
- Page 38 and 39: the origin with slope equal to µ (
- Page 40 and 41: The interplay of these various forc
- Page 42 and 43: non-uniformity is always encountere
- Page 44 and 45: z direction and therefore the same
- Page 46 and 47: Although Reynolds used water in his
- Page 48 and 49: cylinder. For a certain range of Re
- Page 50 and 51: The roles of experimentation and th
- Page 52 and 53: A flow model which assumes steady,
- Page 54 and 55: 2.1 INTRODUCTION Fluid statics 2 Fl
- Page 56 and 57: 3. dp/dz =−ϱg. (Since the pressu
- Page 58 and 59: that is, dp p =−g dz R T Variatio
- Page 60 and 61: atmosphere it is termed vacuum or s
- Page 62 and 63: at its centreline be p. Then, provi
- Page 64 and 65: possible, and a sloping manometer m
- Page 66 and 67: The amount of liquid B on each side
- Page 68 and 69: In a pressure transducer the pressu
- Page 70 and 71: where the suffixes C and Oy indicat
- Page 72 and 73: surface (where the pressure is atmo
- Page 74 and 75: which has different depths of water
- Page 76 and 77: Hydrostatic thrusts on submerged su
- Page 78 and 79: plane and may then be combined into
- Page 80 and 81: Since all the elemental thrusts are
- Page 82 and 83: neglected when a body is weighed on
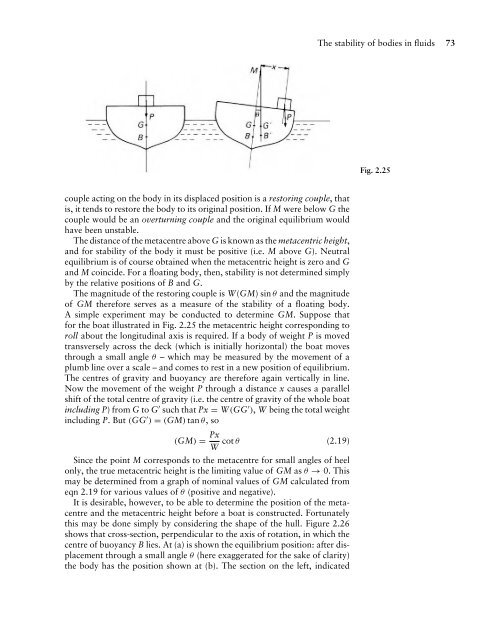
- Page 86 and 87: centre of buoyancy on to the transv
- Page 88 and 89: move, but also the centre of gravit
- Page 90 and 91: that is, W(OG) = (W + F)(OB + BM) =
- Page 92 and 93: is given by ∂p ∂x =−ϱax Equi
- Page 94 and 95: Then ∂p/∂ξ = 0 by definition o
- Page 96 and 97: 2.5 Two small vessels are connected
- Page 98 and 99: 2.18 In the vertical end of an oil
- Page 100 and 101: The principles governing fluids in
- Page 102 and 103: planes B and C (Fig. 3.2), δs bein
- Page 104 and 105: an actual fluid is thus often remar
- Page 106 and 107: density are small. Then eqn 3.9 has
- Page 108 and 109: General energy equation for steady
- Page 110 and 111: General energy equation for steady
- Page 112 and 113: General energy equation for steady
- Page 114 and 115: General energy equation for steady
- Page 116 and 117: − Energy loss to friction/time Ma
- Page 118 and 119: a decrease of pressure (provided th
- Page 120 and 121: in the neighbourhood of B results i
- Page 122 and 123: it is difficult to measure the heig
- Page 124 and 125: The diagram illustrates an orifice
- Page 126 and 127: � depth h below the free surface
- Page 128 and 129: Solution (a) We consider first the
- Page 130 and 131: of the same liquid. A vena contract
- Page 132 and 133: To ensure that the pressure measure
- Page 134 and 135:
Since �h = p1 − p2 ϱwg the flo
- Page 136 and 137:
For consistency with the mathematic
- Page 138 and 139:
showing the essential form of the r
- Page 140 and 141:
With the same assumptions used in d
- Page 142 and 143:
∴ Velocity of approach = 0.0660 m
- Page 144 and 145:
of the base of the notch. Assume th
- Page 146 and 147:
Our aim now is to derive a relation
- Page 148 and 149:
The velocity, in general, varies fr
- Page 150 and 151:
the control volume is � ϱ1u1ux1
- Page 152 and 153:
Applications of the momentum equati
- Page 154 and 155:
that the resultant force on the flu
- Page 156 and 157:
The existence of the reaction may b
- Page 158 and 159:
our reference axes attached to the
- Page 160 and 161:
of increase of x-momentum is � D
- Page 162 and 163:
This is a simplified picture of wha
- Page 164 and 165:
since u4 −u1 is the velocity of t
- Page 166 and 167:
(1) u 1 (2) (3) (4) Assume a sea le
- Page 168 and 169:
and frictional effects to be neglig
- Page 170 and 171:
Physical similarity and dimensional
- Page 172 and 173:
A well-known example of kinematic s
- Page 174 and 175:
polygon. Now a polygon can be compl
- Page 176 and 177:
The condition for dynamic similarit
- Page 178 and 179:
equality of the Mach numbers is not
- Page 180 and 181:
Consider the incompressible flow al
- Page 182 and 183:
moving in a straight line with cons
- Page 184 and 185:
of the analysis, and its correct im
- Page 186 and 187:
Note: a suffix has been attached to
- Page 188 and 189:
For example, the parameter Fϱ/µ 2
- Page 190 and 191:
The application of dynamic similari
- Page 192 and 193:
atmospheric air, the dynamic viscos
- Page 194 and 195:
gives rise to waves on the surface.
- Page 196 and 197:
To be tested, the model must theref
- Page 198 and 199:
it follows that Hence V2 V1 = P2 P1
- Page 200 and 201:
5.5 A torpedo-shaped object 900 mm
- Page 202 and 203:
Laminar flow between solid boundari
- Page 204 and 205:
the place of y: τ = µ ∂u ∂r A
- Page 206 and 207:
compensate for the reduction in vel
- Page 208 and 209:
The expression for the total discha
- Page 210 and 211:
etween the resisting viscous forces
- Page 212 and 213:
must be zero so as to meet the requ
- Page 214 and 215:
Example 6.2 Two stationary, paralle
- Page 216 and 217:
Thus for any value of y the velocit
- Page 218 and 219:
Steady laminar flow between moving
- Page 220 and 221:
in eqn 6.24 we obtain � D Vp 2
- Page 222 and 223:
and the passage of the liquid level
- Page 224 and 225:
this book, it is important to give
- Page 226 and 227:
6.6.4 Rotary viscometers A simple m
- Page 228 and 229:
The torque T on the cylinder of rad
- Page 230 and 231:
stationary when the outer cylinder
- Page 232 and 233:
Fundamentals of the theory of hydro
- Page 234 and 235:
Fundamentals of the theory of hydro
- Page 236 and 237:
Fundamentals of the theory of hydro
- Page 238 and 239:
Fundamentals of the theory of hydro
- Page 240 and 241:
part of the bearing then gives when
- Page 242 and 243:
e determined by our analysis.) From
- Page 244 and 245:
Fundamentals of the theory of hydro
- Page 246 and 247:
Fundamentals of the theory of hydro
- Page 248 and 249:
where a = 6µ�R h3 dh pc dx Funda
- Page 250 and 251:
Integrating this between θ = 0 and
- Page 252 and 253:
Rearrangement of eqn 6.71 and subst
- Page 254 and 255:
6.4 A cylindrical drum of length l
- Page 256 and 257:
7.1 INTRODUCTION Flow and losses in
- Page 258 and 259:
a maximum value of 2.0. The line CD
- Page 260 and 261:
America the friction factor commonl
- Page 262 and 263:
course, quite different from the ro
- Page 264 and 265:
Variation of friction factor 253 Fi
- Page 266 and 267:
straightforward manner without iter
- Page 268 and 269:
Distribution of shear stress in a c
- Page 270 and 271:
7.5 FRICTION IN NON-CIRCULAR CONDUI
- Page 272 and 273:
estimated by simple theory. The pip
- Page 274 and 275:
the junction, the curvature of the
- Page 276 and 277:
particular, the performance of a di
- Page 278 and 279:
A pipe bend thus causes a loss of h
- Page 280 and 281:
cross-sectional area available in t
- Page 282 and 283:
correlating experimental data on th
- Page 284 and 285:
to do this. But sub-atmospheric pre
- Page 286 and 287:
For systems comprising only short r
- Page 288 and 289:
7.8 PIPES IN COMBINATION 7.8.1 Pipe
- Page 290 and 291:
2. There can be only one value of h
- Page 292 and 293:
So For two pipes in parallel, and s
- Page 294 and 295:
7.9 CONDITIONS NEAR THE PIPE ENTRY
- Page 296 and 297:
where u denotes the mean velocity i
- Page 298 and 299:
Assuming that entry and exit losses
- Page 300 and 301:
of one-per-revolution electrical co
- Page 302 and 303:
of the piping system, this meter is
- Page 304 and 305:
losses, calculate (a) the total pow
- Page 306 and 307:
How are the running costs altered i
- Page 308 and 309:
main. The depth of water in the tan
- Page 310 and 311:
the features of boundary layer flow
- Page 312 and 313:
the surface other considerations ar
- Page 314 and 315:
and θ = = = � δ u 0 um � δ 0
- Page 316 and 317:
The momentum equation applied to th
- Page 318 and 319:
1 = y η δ The laminar boundary la
- Page 320 and 321:
Table 8.1 Comparison of results for
- Page 322 and 323:
and � � ∂f (η) B = ∂η A =
- Page 324 and 325:
From equation 8.17, the frictional
- Page 326 and 327:
The turbulent boundary layer on a s
- Page 328 and 329:
Hence F = 0.037ϱu 2 m l(Re l) −1
- Page 330 and 331:
From eqn 8.29 Hence and xt − x0 x
- Page 332 and 333:
from it. This breakaway before the
- Page 334 and 335:
this expression into eqn 8.31 we ge
- Page 336 and 337:
When, for example, a ship moves thr
- Page 338 and 339:
separate vortices in an inviscid fl
- Page 340 and 341:
8.8.4 Profile drag of two-dimension
- Page 342 and 343:
are negligible. With reduction in t
- Page 344 and 345:
Fig. 8.14 Drag coefficients of smoo
- Page 346 and 347:
sphere is falling through the atmos
- Page 348 and 349:
At high Reynolds numbers, the varia
- Page 350 and 351:
this does not prevent the continual
- Page 352 and 353:
Eddy viscosity and the mixing lengt
- Page 354 and 355:
Eddy viscosity and the mixing lengt
- Page 356 and 357:
Velocity distribution in turbulent
- Page 358 and 359:
then, although at very small values
- Page 360 and 361:
as η → 1 and (1 − η) is then
- Page 362 and 363:
When f −1/2 − 4 log 10 (d/k) is
- Page 364 and 365:
comparable with the velocity of sou
- Page 366 and 367:
The x, y and z components of the mo
- Page 368 and 369:
y y x i-1, j+1 i, j+1 i+1, j+1 i-1,
- Page 370 and 371:
e completely covered by a turbulent
- Page 372 and 373:
9.1 INTRODUCTION The flow of an inv
- Page 374 and 375:
Now consider another point P ′′
- Page 376 and 377:
number of smaller ones of which M a
- Page 378 and 379:
distortion, the element is thus not
- Page 380 and 381:
Any function φ that satisfies Lapl
- Page 382 and 383:
ecome perfect squares - except wher
- Page 384 and 385:
fluid, and the flow net indicates t
- Page 386 and 387:
9.6.2 Flow from a line source A sou
- Page 388 and 389:
higher orders of small magnitudes b
- Page 390 and 391:
Combining eqns 9.16 and 9.17 we obt
- Page 392 and 393:
9.6.5 Forced (rotational) vortex Th
- Page 394 and 395:
For a free vortex qR = constant = K
- Page 396 and 397:
source is unable to move to the lef
- Page 398 and 399:
Also we note that the source is pos
- Page 400 and 401:
as shown in Fig. 9.23, encloses all
- Page 402 and 403:
eqn 9.23 becomes ψ =−U � r −
- Page 404 and 405:
Thus the magnitude of the velocity
- Page 406 and 407:
At a stagnation point, qt = 0 and t
- Page 408 and 409:
function of the combined flow is gi
- Page 410 and 411:
or, more approximately, that betwee
- Page 412 and 413:
Then dw dz =−U =−u + iv Hence u
- Page 414 and 415:
An introduction to elementary aerof
- Page 416 and 417:
ound the aerofoil, its magnitude be
- Page 418 and 419:
and lower layers. Since the vortex
- Page 420 and 421:
where Ɣ0 represents the circulatio
- Page 422 and 423:
9.7 An open cylindrical vessel, hav
- Page 424 and 425:
steadily south-east at 6 m · s −
- Page 426 and 427:
10.2 TYPES OF FLOW IN OPEN CHANNELS
- Page 428 and 429:
The steady-flow energy equation for
- Page 430 and 431:
where the hs represent vertical dep
- Page 432 and 433:
to the turbulent rough flow regime
- Page 434 and 435:
selection of an appropriate value r
- Page 436 and 437:
10.6 OPTIMUM SHAPE OF CROSS-SECTION
- Page 438 and 439:
oughness coefficient n is independe
- Page 440 and 441:
thrust divided by width of the chan
- Page 442 and 443:
which the waves follow one another
- Page 444 and 445:
The conditions for the critical dep
- Page 446 and 447:
y downstream conditions. In these c
- Page 448 and 449:
may be obtained by reducing eqn 10.
- Page 450 and 451:
this depth is greater than the crit
- Page 452 and 453:
The dissipation of energy is by no
- Page 454 and 455:
friction, the steady-flow momentum
- Page 456 and 457:
Fig. 10.28 Notice that, for a chann
- Page 458 and 459:
calculated, and then H + u2 1 /2g m
- Page 460 and 461:
Fig. 10.32 If the depth of flow ove
- Page 462 and 463:
(Section 10.11.1). Rapid flow can n
- Page 464 and 465:
where 0 ≤ θ ≤ 90 ◦ and sin
- Page 466 and 467:
(a) The continuity equation is The
- Page 468 and 469:
oundaries. It can occur when the fl
- Page 470 and 471:
into eqn 10.39 we obtain whence dh
- Page 472 and 473:
Table 10.2 Gradually varied flow 46
- Page 474 and 475:
The slope of a given channel may, o
- Page 476 and 477:
direction. The effect of any bounda
- Page 478 and 479:
This momentum term, however, is pro
- Page 480 and 481:
With surface tension effects ignore
- Page 482 and 483:
are for waves of small amplitude) w
- Page 484 and 485:
when the wave was formed. The lengt
- Page 486 and 487:
At a particular instant the crests
- Page 488 and 489:
Hence h = 2.65λ 2π = 2.65 × 225
- Page 490 and 491:
As the ratio of these velocity comp
- Page 492 and 493:
water is impulsively displaced and
- Page 494 and 495:
is relative movement of one layer o
- Page 496 and 497:
the channel bed a drop of 150 mm in
- Page 498 and 499:
11.1 INTRODUCTION Compressible flow
- Page 500 and 501:
energy ÷ mass, so that the dimensi
- Page 502 and 503:
Energy equation with variable densi
- Page 504 and 505:
Solution (a) From the equation of s
- Page 506 and 507:
whence (c − u)δρ = (ρ + δρ)
- Page 508 and 509:
the sonic velocity as supersonic (M
- Page 510 and 511:
velocity into the undisturbed fluid
- Page 512 and 513:
whence p2 p1 = 1 + γ M2 1 1 + γ M
- Page 514 and 515:
of eqns 11.2 and 11.20 T0 T u2 = 1
- Page 516 and 517:
the temperature rises greatly (say
- Page 518 and 519:
Fig. 11.10 Oblique shock relations
- Page 520 and 521:
however, that for a given upstream
- Page 522 and 523:
The deflection through the first wa
- Page 524 and 525:
As δθ is very small, cos δθ →
- Page 526 and 527:
eqn 11.41. Substituting M 2 − 1 =
- Page 528 and 529:
oundaries, both of which are curved
- Page 530 and 531:
For supersonic flow eqn 11.45 is no
- Page 532 and 533:
Some general relations for one-dime
- Page 534 and 535:
of minimum cross-section the veloci
- Page 536 and 537:
downstream of the minimum cross-sec
- Page 538 and 539:
‘telegraphed’ upstream and a pr
- Page 540 and 541:
the external pressure. This compres
- Page 542 and 543:
Compressible flow in pipes of const
- Page 544 and 545:
Table 11.2 Changes with distance al
- Page 546 and 547:
Compressible flow in pipes of const
- Page 548 and 549:
Compressible flow in pipes of const
- Page 550 and 551:
From the Fanno Tables at pc/pB = 0.
- Page 552 and 553:
Compressible flow in pipes of const
- Page 554 and 555:
Therefore and M1 = u1 a 24.5 m · s
- Page 556 and 557:
drag. The abrupt pressure rise thro
- Page 558 and 559:
Analogy between compressible flow a
- Page 560 and 561:
is, on ∂2n ∂y2 + ∂2 � n ∂
- Page 562 and 563:
and the mass flow rate in the duct.
- Page 564 and 565:
11.18 Air flows isothermally at 15
- Page 566 and 567:
12.2 INERTIA PRESSURE Any volume of
- Page 568 and 569:
Equation 12.3 indicates that u beco
- Page 570 and 571:
would come to rest later. Although
- Page 572 and 573:
a pressure wave in a gas; here we r
- Page 574 and 575:
value in eqn 12.7 gives that is, wh
- Page 576 and 577:
the moment disregarded. An increase
- Page 578 and 579:
at this point remains constant for
- Page 580 and 581:
In addition to the reflection of wa
- Page 582 and 583:
is closed so that the area coeffici
- Page 584 and 585:
The pressure diagrams show that for
- Page 586 and 587:
12.3.4 The method of characteristic
- Page 588 and 589:
Pressure transients 577 Multiplying
- Page 590 and 591:
and velocities are known, then for
- Page 592 and 593:
For pipe 2, and hence K ′ = c2 =
- Page 594 and 595:
(instantaneously, we will assume) a
- Page 596 and 597:
The one-dimensional continuity rela
- Page 598 and 599:
to accommodate instantaneous comple
- Page 600 and 601:
12.2 A turbine which normally opera
- Page 602 and 603:
13.1 INTRODUCTION Fluid machines13
- Page 604 and 605:
flow. By way of illustration we sha
- Page 606 and 607:
would obviate the changes of pressu
- Page 608 and 609:
demand for electric power - for exa
- Page 610 and 611:
Turbines 599 Fig. 13.7 Runner of Pe
- Page 612 and 613:
determined, multiplication by the r
- Page 614 and 615:
Substituting for �vw from eqn 13.
- Page 616 and 617:
ut the larger its value the more bu
- Page 618 and 619:
ate of flow possible is achieved wh
- Page 620 and 621:
the turbine. For the high heads nor
- Page 622 and 623:
The integrals in eqns 13.4 and 13.5
- Page 624 and 625:
diagram of Fig. 13.16 we have Simil
- Page 626 and 627:
would be sufficient to describe the
- Page 628 and 629:
Table 13.1 Type of turbine Approxim
- Page 630 and 631:
∴ Hydraulic efficiency = Overall
- Page 632 and 633:
If either z (the height of the turb
- Page 634 and 635:
∴ Hydraulic efficiency = u1vw1/gH
- Page 636 and 637:
shows the general effect of change
- Page 638 and 639:
an unmixed blessing and, except for
- Page 640 and 641:
orbiting space-craft, for example,
- Page 642 and 643:
Losses are also possible at the inl
- Page 644 and 645:
Those particles next to the forward
- Page 646 and 647:
It should be noted that the values
- Page 648 and 649:
∴ (β1)A = arctan(va/u) = arctan(
- Page 650 and 651:
so much that the aerofoil stalls (a
- Page 652 and 653:
Use these data to deduce the pump c
- Page 654 and 655:
Manometric efficiency = 0.75 = gH/u
- Page 656 and 657:
and CP = P/ϱω 3 D 5 in place of Q
- Page 658 and 659:
yields h 1 = h f = 4fl d ≈ (100Q)
- Page 660 and 661:
(iii) the power dissipated by pipe
- Page 662 and 663:
Large numbers of test data for pump
- Page 664 and 665:
educed by rounding the inlet edges
- Page 666 and 667:
further: the turbine part then remo
- Page 668 and 669:
for reaction turbines: 1 − η = 1
- Page 670 and 671:
75 mm wide at outlet. The blades oc
- Page 672 and 673:
Losses at valves, etc. are estimate
- Page 674 and 675:
APPENDIX Units and conversion 1 fac
- Page 676 and 677:
Table A1.4 (contd.) Force 32.17 pdl
- Page 678 and 679:
APPENDIX Physical constants and 2 p
- Page 680 and 681:
Kinematic viscosity mm 2 ·s -1 App
- Page 682 and 683:
Range II: 11 000 m ≤ z ≤ 20 000
- Page 684 and 685:
Table A3.1 (contd.) M 1 M 2 p 2/p 1
- Page 686 and 687:
Table A3.2 Isentropic flow M p/po
- Page 688 and 689:
Table A3.3 Adiabatic flow with fric
- Page 690 and 691:
APPENDIX 4 Algebraic symbols Table
- Page 692 and 693:
Table A4.1 (contd.) Symbol Definiti
- Page 694 and 695:
Table A4.1 (contd.) Symbol Definiti
- Page 696 and 697:
Answers to problems 1.1 56.2 m 3 1.
- Page 698 and 699:
8.14 0.002955, 2.866 m · s −1 ,
- Page 700 and 701:
Absolute pressure 46 Absolute visco
- Page 702 and 703:
Eccentricity 230 Eccentricity ratio
- Page 704 and 705:
Mach angle 498 intersection 510-1 r
- Page 706 and 707:
Slip in fluid couplings 652 in reci
- Page 708:
eBooks - at www.eBookstore.tandf.co